
PMM8713/PMM8723/PMM8714步进电动机脉冲分配器
由日本Sanyo(三洋)电机公司生产的PMM8713、PMM8723、
PMM8714是步进电动机控制用的脉冲分配器(又称逻辑转换器)单片CMOS集成电路。
PMM8713适用于控制三相和四相步进电动机,可选择下列六种激励方式。
4相步进电动机:1相、2相、1-2相激励;3相步进电动机:1相、2相、1-2相激励。
PMM8723适用于控制四相步进电动机,是PMM8713的简化结构,表面安装方式,价格较低,可选择两种激励方式:1-2相、2相激励。
PMM8714适用于控制五相步进电动机,可选择六种激励方式:2相、2-3相、3相、4相、4-5相、5相激励。
它们的输入方式可选择单时钟(加方向信号)和双时钟(正转或反转时钟)方式,具有正反转控制、初始化复位、原点监视、
激励方式监视和输入脉冲监视等功能。使用电源电压:PMM8713和PMM8714用Vm=4~18V,PMM8723用V加p=5V单电源。相
输出驱动能力(源电流或吸入电源)为±20mA。国产5G8713(上海元件五厂产品)可与PMM8713、MB8713(富士通公司产品)直接互换。
1.引脚功能此种集成电路内部由时钟选通、激励方式控制、激励方式判断、可逆环形计数器等主要部分构成。所有输入端内都设有施密特电路,提高了抗干扰能力。图5-3表示PMM8713的原理框图。
PMM8713采用DIP16封装,引脚功能说明见表5-2,激励方式选择和初始状态见表5-3。
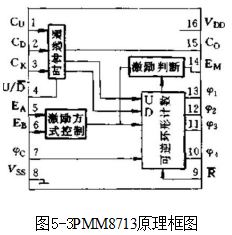
表5-2PMM8713引脚功能说明
引脚号 | 符号 | 功能说明 |
1 | Cu | 输入脉冲、正转CW时钟 |
2 | Cn | 输入脉冲、反转CCW时钟 |
3 | Ck | 输入时钟(单时钟方式用) |
4 | U/D | 方向转换,0——反转,1——正转 |
5 | EA | 激励方式控制,EAE8:1l——1-2相,00 |
6 | EH | -2相、01、10—1相 |
7 | 3/4相选择,0——3相,1-—4相 | |
8 | Vss | 地 |
9 | R | 复位端,低电平有效 |
引脚号 | 符号 | 功能说明 | |
10 | PI | 输出 | |
11 12 | PP3 | 输出 输出>3相 | 4相 |
13 | 4 | 输出 | |
14 | EM | 激励监视:0-—1相,1——2相,脉冲表示1-2相激励 | |
15 | CD | 输人脉冲监视:输出与时钟同步脉冲 | |
16 | VDD | 正电源,+4~+18V | |
表5-3PMM8713激励方式选择和初始状态
激励方式 | 输入 | 输出 | ||||||||
φc | EA | EB | R | EM | 中1 | P2 | 3 | P4 | ||
3相 | 1-2相 | 0 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 0 |
2相 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | |
1相 | 0 | 0 | 1 0 | 0 | 0 | 1 | 0 | 0 | 0 | |
4相 | 1-2相 | 1 | 1 | 1 | 0 | 1 | 1 | 0 | 0 | 1 |
2相 | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | ||
1相 | 1 | 0 1 | 1 0 | 0 | 0 | 1 | 0 | 0 | 0 | |
PMM8723采用DIP14封装,引脚功能说明见表5-4,激励方式选择和初始状态见表5-5。
表5-4PMM8723引脚功能说明
引脚号 | 符号 | 功能说明 |
1 | CW/Ck | 单时钟:Ck、U/D为方向转换 |
2 | CCW/(U/D) | 双时钟:CW——正转,CCW——反转 |
3 |
CC | 时钟输入方式控制:0——双时钟,1——单时钟 |
4 | E | 激励方式控制:0——2相,1-—1-2相 |
5 | Pp | 输出关断,低电平有效 |
引脚号 | 符号 | 功能说明 |
6 | R | 复位,高电平有效 |
7 | Vss | 地 |
8 | φ | 输出 |
9 | 中3 | 输出 |
10 | 中2 | 输出 |
11 | 中t | 输出 |
12 | Z | 原点监视 |
13 | Vss | 地 |
14 | YDD | 正电源+5V |
表5-5PMM8723激助方式选择和初始状态
激励方式 | 输人 |
输出 | ||||||||||
双时钟 | 单时钟 | |||||||||||
R | PD | CC | E | R | Po | CC | E | 中1 | P2 | φ3 | 94 | |
2相 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 1 |
1-2相 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 1 |
PMM8714采用DIP24封装引脚,引脚功能说明见表5-6,激励方式选择和初始状态见表5-7。
表5-6PMM8714引脚功能说明
引脚号 | 符号 | 功能说明 |
1 | Cc | 输入脉冲,正转CW时钟 |
2 | Cp | 输人脉冲,反转CCW时钟 |
3 | Ck | 单时钟输人 |
4 | U/D | 方向转换:0-反转,1-正转 |
5 | EA | |
6 | EB | 激励方式控制 |
7 | Ec |
引脚号 | 符号 | 功能说明 |
8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
VssR
φD gc PB A
gcφB PA VpD | 输出关断 相原点监视 输入脉冲监视 激励监视 地 复位输出输出输出输出输出输出输出输出输出输出 +4~+18V |
表5-7PMM8714激励方式选择与初始状态
激励方式 | 输入 | 输出 | |||||||||||
EA | Eh | Ec | 中A | 中B | 9c | 9D | 9E | φA | B | 甲c | 平 | ||
2相 | 0 | 1 | 1 | 1 | l | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
2-3相 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
3相 | 1 | 0 | L | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
4相 | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
4-5相 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
5相 | L | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 1 |
2.运行方式PMM8713作单极性控制。三相步进电动机:1-2相激励6拍运行;1相或2相激励3拍运行。四相步进电动机:1-2相激励8拍运行;1相或2相激励4拍运行。
PMM8723作单极性控制。四相步进电动机:1-2相激励8拍运行;2相激励4拍运行。
PMM8714可作单极性和双极性方式控制。其中2相、3相和2-3相激励时为单极性,只利用φA~E输出端,φA~PE恒为低电平,2相或3相激励5拍运行:2-3相激励10拍运行。而4相、5相、4-5相激励时为双极性控制,其中4相或5相激励10拍运行;4-5相激励20拍运行。运行中,2相或4相激励时,激励监视端EM为低电平;3相和5相激励时,EM为高电平;2-3相或4-5相激励时,EM为0-1-0交替出现。经原点状态时Z。变为高电平。
3.应用三种芯片输出需外接功率驱动电路,方可驱动步进电动机。对于单极性工作方式,推荐使用达林顿晶体管作开关。采用NPN型开关时,基极串接电阻R按表5-8选择。
表5-8基极串接电阻的推荐值
型号 | PMM8713 | PMM8723 | PMM8714 | ||||
电压/V | 5 | 10 | 15 | 5 | 5 | 10 | 15 |
电阻/Q | 100 | 300 | 500 | 320 | 220 | 680 | 1000 |
功率/W | 1/2 | 1 | 1 | 1/8 | 1/2 | 1 | 1 |
对于双极性驱动方式,可采用各种H桥电路,例如L293、L298等集成电路。
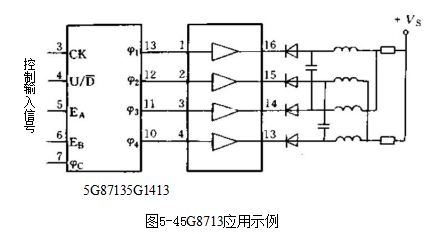
图5-4的例子是采用国产5G8713外接5G1413达林顿晶体管阵列驱动集成电路,再驱动四相绕组。它适用于电压小于50V、相绕组电流峰值小于250mA的情况。SG1413输入端已在内部串有2.7kΩ限流电阻,因此可直接与5G8713输出端连接。
脉冲分配器过去曾称为“环形分配器”,这是由于它早期是用分立的环形计数器构成的原故。用微机控制步进电动机,若将此分配器功能由CPU软件代替,俗称为“软环分”,CPU多个并行口输出各相分配脉冲信号,直接控制功率驱动级,称为直接控制法。另一种是间接控制法,CPU进行插补运算,给出每台电机转速指令,从CPU两个并行口输出步进脉冲和方向信号(或正反脉冲),送给PMM8713等脉冲分配器,让硬件完成脉冲分配任务,从而减轻CPU的负担。
随便看看
- 2024-09-29液压系统蓄能器
- 2024-12-31挖掘机突然熄火故障
- 2024-11-2625YCY14-1B型泵止推板的加工工艺过程
- 2024-12-26W4-60C型挖掘机故障排除两例
- 2024-12-26柴油机排气异常故障分析