
步进电动机控制专用集成电路
概述
步进电动机区别于其他控制用途电动机的最大特点是,它接收数字控制信号(电脉冲信号),并转换成与之相对应的角位移或直线位移。它本身就是一个完成数字/模拟转换的执行元件。而且它可开环位置控制,输入一个脉冲信号就得到一个规定的位置增量,这样的所谓增量位置控制系统与传统的直流伺服系统相比,其成本明显降低,几乎不必进行系统调整,因此,随着运动控制系统数字化到来,步进电动机的应用日益广泛。例如,在计算机外围设备(如打印机、磁盘驱动器、数字绘图仪、纸带穿孔机)、现代办公室设备(如复印机、传真机)、各种自动机、仪器设备、材料输送机、数控机床、工业机器人等中获得大量应用。与之相适应,各国半导体厂商开发和生产了大量适用于步进电动机控制的专用集成电路。部分产品列于表5-1中,并给出了它们的主要特点。
表5-1步进电动机控制专用集成电路一览表
型号 | 厂商 | 电压/V | 电流/A | 特点 | 封装 |
PMM8713*PMM8723 *PMM8714 STK6722HSTK6822HSTK6981HSTK6982H STK6962 |
三洋 | 18 5 18 | 脉冲分配器,3/4相脉冲分配器、4相 脉冲分配器,5相 | DIP16IDIP14DIP24 | |
45 30 42 42 30 | 1.51.4 1.52.52 |
四相,单极性,斩波 | SIP18 SIP18 SIP18SIP18Module | ||
L297/AL6506 |
SGS | 10 30 | 控制器.四相,斩波,电流可编程控制器、四相,斩波,电流可编程 | DIP20DIP18 |
型号 | 厂商 | 电压/V | 电流/A | 特点 | 封装 |
*L6217 *L6217A GS一D200MC3479C |
SGS | 18 18 46 18 | 0.40.42.50.35 | 两相驱动,微步距,6bitD/Al两相躯动,微步距,7bitD/A两相,智能,微步距 两相,L/R | QCC-544QCC-J44moduleDIP16 |
MC3479 |
HOTOROLA | 18 | 0.35 | 两相,L/R | DIP16 |
*SAA1042 | 18 | 0.5 | 四相,L/R | LIP16 | |
UC3517UC3770 *UC3717/A |
UNITRODE | 40 50
45 | 0.352 1 | 四相,L/R 一相,H桥驱动、斩波,全波,半波,微步距 -相,H桥驱动,斩波,全波,半波,微步距 | IIP16DIP16 DIP16 |
*PBL3717 | SGS | 45 | 1 | 一相,H桥驱动,斩波,全波,半波,微步距 | DIP16 |
*UCN5804B UCN4202AUCN4204B |
Allegro | 35 5 20 | 1.5 0.51.5 |
四相,L/R | DIP16DIP16DIP16 |
SAA1027 | Signetics | 18 | 0.5 | 两相,L/R | DP16 |
SAA1027 | Philips | 18 | 0.5 | 两相、L/R | DIP16 |
+IXMS150 | IXYS | 12 | 双PWM,两相微步距控制 | DIP24 | |
TCA1560TCA1561TCA3727TLE4727 |
SIEMENS | 40 45 50 25 | 0.51.51.01.0 |
两相驱动 | SO-20TZIP-9DIP20DIP20 |
1M2000 | ]ntelMotion | 5 | 两相,徽步距控制 | QCC-J68 | |
MB8652IP | 富士通 | 5 | 0.14 | 斩波频率50kHz | DEP20 |
TL376 | T.1. | 18 | 0.5 | 两相、斩波 | DLP14 |
HA13421 | 日立 | 15 | 0.33 | 两相驱动 | DIP18 |
M54640P | 三菱 | 40 | 0.8 | 打印机用,两相,斩波驱动 | DIP16 |
型号 | 厂商 | 电压/V | 电流/A | 特点 | 封装 |
M54646BP M54670 M54671SPM54672SP |
三菱 | 40 35 12 12 | 0.80.81.21.2 |
打印机用、两相,斩波驱动 | DIP28DIP32DIP32DIP32 |
SI7200ESI7230M SL7230E
S17300AS17500A |
Sanken【三肯) | 50 7 50 7 8 | 1.03.2 1.5 1.71.0 | 两相驱动 两相驱动两相驱动 四相驱动四相驱动 |
SIP |
TD62803PTA7774P *TA7289P |
东芝 | 2812/5 30 | 0.40.1 0.7 | 3相,4相,L/R驱动 双电压驱动,两相双H桥,4bitD/A,PWM电流斩波,相,微步距 | DIL16DIL16 DIL14 |
*MTD1110*MTD1120 MTD2001并MTD2003 |
日本新电元工业 | 80 80 60
30 | 2 1.21.5 1.2 | 四相,斩波驱动四相,斩波驱动 两相,H桥、斩波驱动,四种电流可选 两相,H桥,斩波驱动,四种电流可选 |
ZIP-27 |
*5G8713 | 上海元件五厂 | 18 | 同PMM8713 | DIP16 | |
CH250CH224 |
上海华岭 | 5~155 | 三相脉冲分配器 四相脉冲分配器I | DIP16DIP14 |
注:表中型号中带*的产品本章有较详细介绍。
步进电动机可分为永磁式、磁阻式(即反应式)、混合式三种主要结构型式。它的相数有两相、三相、四相、五相、六相等多种选择。但在小功率范围内,最常见的还是两相或四相永磁式或混合式步进电动机。因此,从表5-1可见,两相和四相的驱动器电路占绝大多数。三相的电路不多。五相混合式步进电动机是出现较晚的产品,故五相的控制集成电路还很少。
步进电动机另一个特点是,它必须与相应的电子驱动电路配套使用,而且其工作性能在很大程度上取决于所使用的驱动电路的类型和具体参数。这些性能包括起动频率、最高转速、动态转矩、阻尼能力、效率等。
尽管步进电动机各相绕组之间、定转子之间存在强耦合,电磁关系存在较严重的非线性,但从驱动电路角度来看,对一台步进电动机的控制,就是按一定顺序向多相线圈通电,对各相电流的控制以产生必要的转矩的问题。因此,就步进电动机控制而言,各相通电顺序的产生和电流波形的控制是主要的问题,其次是一些保护问题。
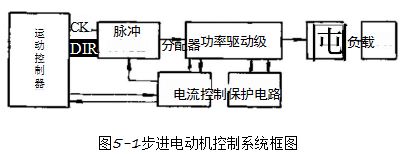
图5-1给出完整的步进电动机控制系统框图。由运动控制器给出的输入指令是输入时钟CK和方向指令DIR。它们在脉冲分配器中经逻辑组合转换成各相通断的时序逻辑信号。导通程序逻辑信号送至功率驱动级,转换成其内部功率开关的基极(或栅极)驱动信号。功率驱动级除包括功率开关及其驱动电路外,可能还包括一些电流反馈控制和限流、限压、过热保护等附助电路部分。目前,集成化的步进电动机电路包括有下列几种类型:单独的脉冲分配器集成电路,如PMM8713、PMM8723、PMM8714、CH250、CH224等;包含脉冲分配器和电流斩波控制电路的控制器集成电路,如L297,L6506等;只含功率开关驱动或包含电流控制、保护电路的驱动器集成电路,如MTD1110、MTD1120、MTD2001、MTD2003、L298等,以及第11章的H桥功率开关,如LMD18200、LMD18201、LMD18245等;最后就是将脉冲分配器、功率驱动、电流控制和保护电路都包括在内的集成电路,如SAA1042、UCN5804等。下面就步进电动机控制的基本问题分述如下。
1.单极性和双极性驱动,电压驱动和电流驱动步进电动机驱动方式,按相绕组流过的电流是单向的或双向的,分别称为单极性和双极性驱动。通常,三相、四相步进电动机采用单极性驱动。而两相步进电动机必然采用双极性驱动,使用两个H桥功率开关是典型的驱动电路。从步进电动机绕组利用率来说,双极性比单极性利用率要高。
从功率驱动级电路结构来看,可区分为电压驱动和电流驱动两种驱动方式。电压驱动方式包括串联电阻驱动和双电压驱动。而电流驱动方式最常见的是采用电流反馈斩波驱动,见图5-2。
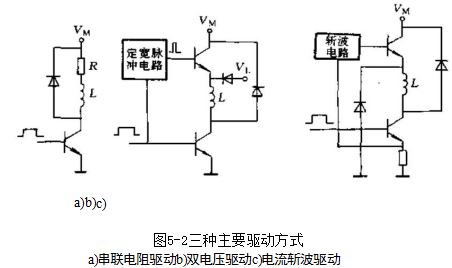
为提高步进电动机高速性能,希望功率开关速度提高后,相绕组电流仍然有较快速的上升和下降,并有较高的幅值。因此,驱动电路采用过激励方法,以解决被驱动的相绕组都有较大的电感,总是使电流变化滞后子施加的开关电压的问题。串联电阻驱动方式是在相绕组中串接一定阻值和功率的电阻,一方面增加了绕组回路的电阻,从而减小了回路的时间常数。众所周知,此时间常数正比于回路电感L和总电阻R之比(L/R)。另一方面过激励必然需要提高驱动绕组的电压,因此串联电阻的作用是,对低频和静止工作时的电流进行限制。这种驱动方式用得最多,因为它的成本较低。表5-1中单极性驱动的、标有L/R的集成电路都是采用这种驱动方式,个别的双极性驱动也采用。显然,串联电阻驱动的效率较差。双电压驱动又称为高低压驱动,每相绕组导通时,首先施加高电压,使电流快速上升,当电流上升到规定幅度时,将高电压切断,回路电流以低电压电源维持。还有高压定脉宽控制的方案。这种双电压驱动方式在专用集成电路中使用不多。东芝公司的TA7774是一例。它是一个驱动两相步进电动机的集成电路,使用12V(高电压电源)和5V(低电压电源)。它利用引脚Ps施加逻辑高电平或低电平来改换施加到两个H桥功率开关上的电压。
恒流斩波驱动方式是在专用集成电路中最常见的获得高性能的方式。通常,步进电动机使用较高电压电源,使绕组电流几乎以直线上升到预定值,由电流检测去控制一个斩波控制电路,关断这绕组的功率开关,绕组电流在续流回路中续流并下降,下降至某一设定值或某一规定时间后,斩波控制电路又令主功率开关接通。如此反复控制,由功率开关的反复开关对绕组电流进行斩波控制,使电流平均值趋向于维持恒定。具体控制方法有定频PWM方法或使用单稳电路的关断定脉宽方法。典型电路原理参见5.5节的MTD2003F和MTD1120F的说明。表5-1中凡标有“斩波”的集成电路均采用类似的斩波驱动方式。这种方式使步进电动机电流的大小和波形是可控的,弥补了我们对步进电动机运行模型认识的不足,也补偿了由于制造的偏差和发热等因素引起运行参数的改变。如果电流的基准值可以设定和控制,可实现半步、1/4步和微步距控制,以及步进电动机处于锁定(静止)状态时,设置较低锁定电流的控制,以减少能耗和发热。
2.保护电路功率驱动级的功率开关对大电感绕组线圈进行开关控制,还必须注意为开关关断时提供续流回路和其他吸收回路等措施,以保护功率开关免受感应电动势尖峰电压的危害。特别是使用双极型功率晶体管时,要防止出现二次击穿问题。采用快速恢复二极管接通续流回路,使用稳压二极管钳位保护,使用二极管、电容、电阻组成的吸收网络等都是常见方式,可参见后述各专用集成电路的应用示例。
3.整步、半步和微步距步进电动机按各相绕组通电方式,即在交替导通顺序上是一相—一相的,或两相一两相地导通,还是交替出现一相一两相地导通等不同,而出现所谓整步和半步驱动。例如,三相步进电动机,采用每步为单相驱动或每步都为两相同时驱动的,是单相三拍或两相三拍导通方式,理论步距角为120°(电角度),我们称它为整步(Fullstep),也称为基本步距。如果采用单相-两相-单相交替导通方式,可得到六拍导通方式,每步步距为整步的一半,即60°,称为半步工作。此种通电方式由脉冲分配器设计时确定的,可参见本章5.2节。在5.6节中,UC3717采用了脉冲分配器和斩波电流控制的结合,且指令电流值可设定三种不同的值,使步进电动机可实现整步、半步和1/4步的控制。在5.8节中TA7289采用稍有不同的电路结构实现有1/4步的控制。
微步距控制技术(又称为细分技术)是步进电动机开环控制最新技术之一,利用计算机数字处理技术和D/A转换控制技术,将各相绕组电流通过PWM控制,获得按规律改变其幅值的大小和方向,实现将步进电动机一个整步均分为若干个更细的微步。每个微步距可能是原来基本步距的数十分之一,甚至是数百分之一。具体微步距驱动可参见下述的TA7289、UC3717、L6217、IXMS150等集成电路的说明。微步距技术使步进电动机步距细化,分辨率有所提高,振动、噪声和转距波动问题得到很大改善,运转更为平稳,使步进电动机在高级控制系统中获得更大的竞争力。
4.步进电动机运动控制器集成电路步进电动机开环控制,
对系统惯性比较敏感,在加减速过程有可能造成失步而使控制失败。运动控制器通常由微型计算机构成,它不但要完成位置控制,而且要设置好加速和减速过程的指令频率变化(即速度和加速度)变化,以防止失步的发生。例如,在点位控制中,设置好速度图曲线,在起动和升速时,使步进电动机产生足够的转矩驱动负载,跟上指令速度和加速度,在减速时,下降特性使负载不要过冲,能停止到指令规定的位置上。此外,运动控制器还为步进电动机控制提供电流指令及故障诊断、中断等指令。
这方面的任务也可以用步进电动机运动控制器集成电路来完成。例如,第13章所述的HCTL-1100通用运动控制器、CY512智能步进电动机位置控制器、CY525智能步进电动机斜坡控制器,CY545高性能步进电动机控制器,以及PPMC101和PPMC102步进电动机控制器等。
随便看看
- 2024-09-18定期进行检查维修一览表-挖掘机换装及注意事项
- 2024-10-24小松PC200-5挖掘机跑偏故障的排查
- 2024-09-14每250小时的整备-挖掘机点检整备篇
- 2024-09-29煤用作柴油发动机燃料
- 2024-09-18步进电机工作原理