
ML4411无转子位置传感器的无刷直流电动机控制器
ML4411是为硬盘主轴无刷直流电动机驱动而设计的,也可用于其他三相三角形或星形联结的无刷直流电动机的控制。它不必使用霍尔位置传感器,转子位置信息从电动机三相绕组的反电动势而来,采用锁相环(PLL)技术,确定合适的换相时刻。电机起动和换相过程由ML4411完成。它接受外接微控制器的控制信号,起动过程的定时由微机决定,允许系统对不同电动机、不同转动惯量的负载控制进行优化。ML4411可直接驱动功率MOS-FET,对电动机的电流进行调节。它采用28脚双列表面封装。
1.特点
·以反电动势信号换相,提供较大转矩,缩短起动时间
·提供精确的电动机转速频率作为反馈信号·两种电动机电流控制方式:线性或PWM·容易和微机接口、优化起动和速度控制
·延时制动,功率故障检出
·直接驱动外接P沟道和N沟道MOSFET
2.引脚功能说明引脚名和功能说明见表3-15和图3-47。
表3-15ML4411的引脚功能说明
引脚号 | 符号 | 功能说明 |
1 | GND | 信号地和电源地 |
2 | P1 | 驱动外接P沟道MOSFET、对应于电机PH1 |
3 | P2 | 驱动外接P沟道MOSFET,对应于电机PH2 |
4 | VCC2 | +12V,供制动的电源 |
5 | P3 | 驱动外接P沟道MOSFET、对应于电机PH3 |
6 | CoTA | 线性电流控制的补偿电容外接端 |
7 | CBRK1 | 接电容,用于制动控制 |
8 | DISPWR | 当施加0电平时,P1~P3、N1~N3输出被禁止、并使内部TACH比较器输出接到15脚 |
9 | N1 | 驱动外接N沟道MOSFET,对应于电动机PH1 |
10 | N2 | 驱动外接N沟道MOSFET,对应于电动机PH2 |
11 | N3 | 驱动外接N沟道MOSFET,对应于电动机PH3 |
引脚号 | 符号 | 功能说明 |
12 | I(SENSE) | 电动机电流检测输入 |
13 | Cos | PWM电流控制的定时电容外接端 |
14 | Cvco | VCO定时电容外接端 |
15 | vCO/TACHOUT | VCO或TACH的输出 |
16 | RESET | 复位信号输入 |
17 | PWRFAIL | 输出为0电平,表示5V或12V电压不足 |
18 | ENABLEE/A | 输入高电平使误差放大器工作,并使反电动势反馈环闭环工作 |
19 | +5V | +5V电源端 |
20 | RC | 接VCO环路的滤波元件 |
21 | 5(RAMP) | 此输入电流设置电动机起动时VCO最初上升的加速比率 |
22 | PH1 | 接电动机第1相 |
23 | PH2 | 接电动机第2相 |
24 | PH3 | 接电动机第3相 |
25 | Vcc | +12V电源 |
26 | BRAKE | 施加0电平时开始制动 |
27 | I(LIMIT) | 设量PWM电流控制的门限 |
28 | I(CMD) | 线性电流放大器的指令 |
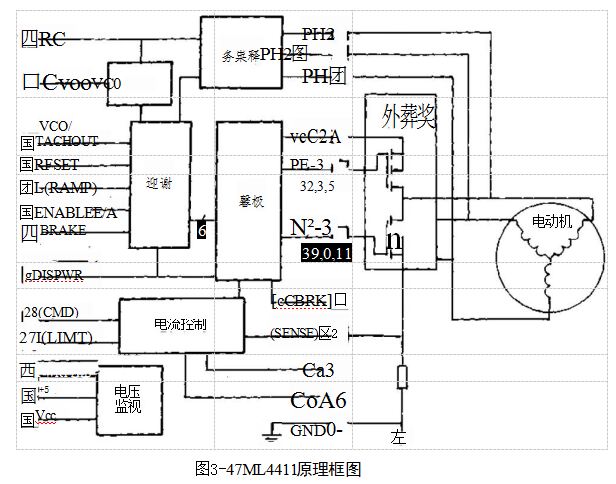
3.功能说明ML4411原理框图见图3-47。本IC不用专门的转子位置传感器可完成三相无刷直流电动机的电子换向。为此,IC内设有一个由VCO(压控振荡器)电路、反电动势采样误差放大器和顺序器组成的锁相环电路,它将VCO频率锁定到电动机反电动势频率上。电动机的起动程序和速度由外接微机控制,从15脚可获得电动机转速频率信号。
(1)反电动势检测与换相信号的获得(见图3-48):在IC内有一个申请了专利的反电动势检测电路。此电路包括了中点模拟
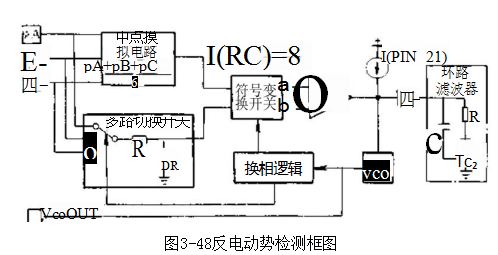
电路(NEUTRALSIMU-LATOR)、多路切换开关(MULTIPLEXER)、符号变换开关(SIGNCHANG-ER)等电路。由于有了中点模拟电路,不必从电机三相绕组中引出中线,这是与3.10和3.11节所述的IC不同之处。从任一相绕组电压示波图(见图3-49)可见,与假想中点电位相交点附近的部分是该相绕组不激

励时间的反电动势波形。本电路能检测出此时相绕组的反电动势波形,并进行采样,以确定转子当前的相位,决定换相频率(VCO)应当增加还是减少。换向频率与采样反电动势相位比较,落后的换相使误差放大器向20脚滤波器充电,从而增大VCO输入。相反,提早换相将会引起20脚上电容放电,使VCO输入减
少。利用此PLL技术,获得适当的换相时刻。此外,从20脚取出的信号是代表电动机速度的电压信号,可用于模拟型速度控制,见图3-48、图3-49、图3-50。
三个PH端对地的输入阻抗只有8kΩ,故对较高电压的电机,
须用电阻分压后才从PH端输入,使此三端输入电压的最大值不超过电压Vcc。
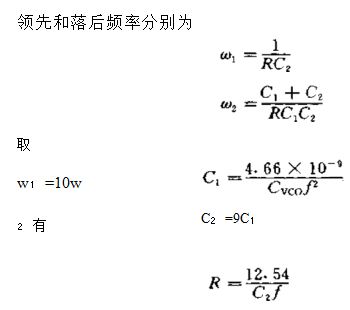
(2)锁相环参数的计算:VCO工作的最高频率fmax与电动机最高工作转速nms(r/min)关系是
fmx=0.05pnmax式中p——电动机极对数。
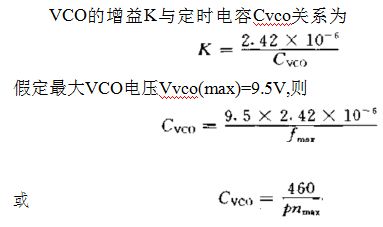
Cw的单位为μF。由电动机极数和要求最高转速依上式计算定时电容Cvco。
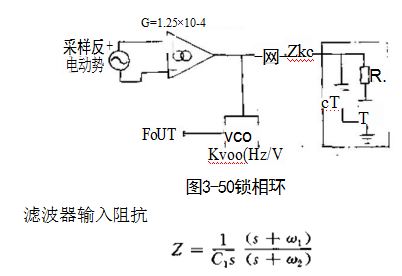
如图3-50所示,反电动势锁相环的相位检出器是由反电动势相位检出和放大器(Gm)组成,20脚(RC)端外接环路滤波器。此滤波器R、C、C₂可按下面方法计算。
(3)起动程序:如前所述,换相是由反电动势检出经锁相环闭环控制而完成的。需要电动机从静止开始起动时,必须由其他办法“开环”起动,到产生足够大的反电动势方能进入正常换相。下面是一个从静止起动的典型程序,此时8脚取低电平,使15脚是TACH输出,参见图3-51、图3-52。
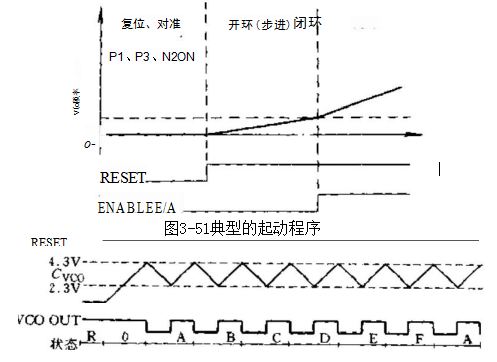
第一步:本IC被复位(RESET=0),维持R状态,全部功率施加到电机绕组,P1、P3和N2为导通状态,使电机转子强制对准在A状态前面30°(电角度)位置上,为起动做好准备,见表3-16。
第二步:释放复位信号(RESET=1),在21脚施加固定值的
电流,在20脚出现充电电流,使VCO电压上升,电机以开环步进方式按规定速率加速。微机监视TACH信号。
第三步:当电动机转速达到约100r/min时,18脚被拉至高电平,使反电动势锁相环接入工作,进入正常换相方式。
上述起动过程由外接微机控制。
表3-16换相状态表
状态 | 输出 |
采样 | |||||
N1 | N2 | N3 | P1 | P2 | P3 | ||
R或0 | ON | ON | ON | 二 | |||
A | ON | ON | PH2 | ||||
B | ON | ON | PH1 | ||||
C | ON | ON | PH3 | ||||
D | ON | ON | PH2 | ||||
E | ON | ON | PH1 | ||||
F | ON | ON | PH3 | ||||
注:输出端中ON表示导通,空格表示不导通。
(4)PWM和线性电流控制:为了便于速度控制,ML4411内设置了两个电流控制环,线性的和PWM的。电动机电流是由取样电阻上的电压降进行检测,从12脚输入,内设跨导放大器放大12脚I(SENSE)和28脚I(CMD)的差值,其输出调制三个N沟道MOSFET开关。这是线性控制环。I(SENSE)信号还和27脚I(LIMIT)信号在比较器中进行比较,比较器输出接单稳态电路,后者由接13脚的外接电容器Cos定时。这些电路组成了PWM
限流电路。这两个电路的作用使电动机电流受控于I(CMD)和I(LIMIT)中较小的。
(5)制动控制
为了制动电动机,首先使8脚为零电平,然后使26脚BRAKE电平下降。当电平降到1.4V以下,内部比较器强制三个N沟道MOSFET导通,实现电动机的制动。
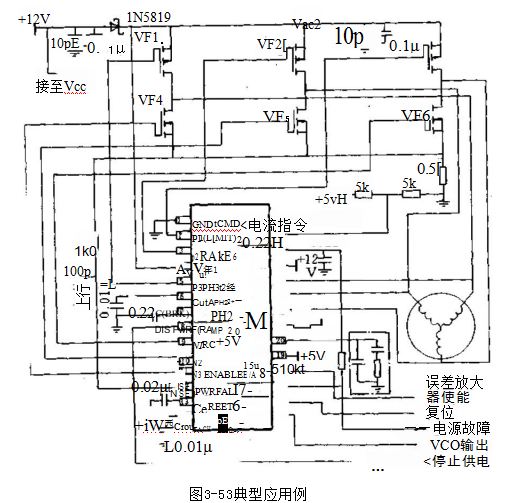
4.典型应用图3-53是硬盘驱动器主轴控制的例子。它的控制信号均来自上级微控制器。
随便看看
- 2024-09-19缸盖连接强度的计算-液压传动基础知识
- 2024-09-20电火方式的种类
- 2024-09-19液压泵的故障和排除-液压传动基础知识
- 2025-01-09场效应半导体三极管
- 2024-12-20液压阀孔的滚压加工