
锁相环电动机速度控制专用集成电路
近代许多小型直流电动机(包括有刷或无刷直流电动机)在应用时通常需要精确的速度控制。在数据存储设备,如磁盘驱动、磁带驱动、光盘驱动或高级音像设备,为了提高存储密度,要求记录媒体通过读/写头时有精确的速度。这些设备的驱动电动机转速往往要求与某一基准频率严格同步,或多台电动机转速同步,或保持以一个确定速比同步运转,在这种场合下,常采用锁相环(PLL)速度控制技术。
锁相环技术本来用于通信系统,例如使无线电接收机频率同步、在电视接收机使水平扫描和垂直扫描振荡器跟同步脉冲信号同步、宽带锁相接收机被用来跟踪卫星的微弱信号并具有良好的抗干扰性能。在电子仪器领域,利用PLL技术的频率合成器获得高精度频率的信号。大规模集成电路技术进展可廉价生产单片的频率-相位检出器,甚至生产整个锁相环集成电路。使锁相环技术能推广到其他领域。PLL在电动机控制中应用就是一个成功的例子。
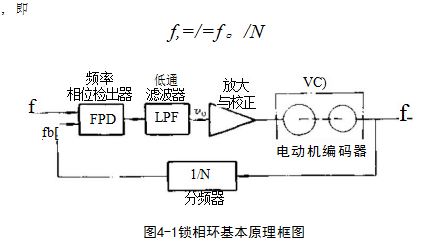
如图4-1所示,锁相环的主要环节是频率-相位检出器(FPD,又称频相比较器或鉴相器)、低通滤波器(LPF)和压控振荡器(VCO)。后者产生输出频率f经分频系数为N的反馈通道得到反馈频率f,它在FPD中与参考频率f.进行频率比较和相位比较,FPD输出反映出其频率差和相位差的信号。此信号经LPF后得到与之成正比关系的偏差电压vc,再经放大和校正后,作用于VCO,控制输出频率f。锁相环是一个闭环反馈控制系统,在闭环负反馈作用下,系统使f,和f的频差和相差向着减少的方向
变化,最后系统“锁住”,两个信号频率达到了同频和接近于同相。分频器的作用是使输出频率f。与基准频率f有确定的比例关系
电动机速度控制的锁相环与上面的基本原理框图相似,只是由电动机加上编码器代替了压控振荡器的作用。对于常用的电枢控制永磁直流电动机,外施电压与电动机转速之间有良好的线性关系,而安装在电动机转轴上的数字脉冲测速机,如光学增量编码器或频率发生器(FG)、其输出脉冲频率又与转速成严格的正比关系,因此,可比拟为一个电压控制振荡器。但是,在电子PLL系统(例如频率合成器)设计中,VCO可考虑为一个瞬时响应元件。但在我们讨论的机电系统中,由于电动机电感及系统机械惯量的存在,响应的延迟,再加上负载转矩作为一个主要干扰量,都使环路设计复杂化。
采用电动机锁相环系统的目的是使反馈频率信号与给定的基准频率信号同步。系统根据两者频率或相位的任意差异来校正电动机转速。如果基准信号频率是一个固定的高精度信号,当系统进入“锁相”时,它们的频率相等,相位差维持在一常数附近摆动,保证电动机运行在一个准确的转速上,不会因为温度或元件老化而产生漂移,使长时间速度稳定度达到基准信号频率的稳定度水平。例如,采用石英晶体振荡器分频时钟作为基准频率时,其速度精度和稳定度都可达0.02%或更好。应当注意,这里说的是
长时间平均速度的精度和稳定度,而瞬时速度则依赖于系统设计及负载性质,仍有较大的变化。
频相比较器(FPD)是锁相环中关键环节。对它的基本要求是:
(1)具有鉴频和鉴相双重作用,而且从鉴频到鉴相的过渡是连续的。应当避免电动机锁定于基准频率的整数倍或分次谐波频率上,否则锁定速度就不是唯一的事。
(2)宽的频率捕捉范围和锁定范围。频率锁定范围是指在此频率范围内,PLL,可进入“锁定”。而频率捕捉范围是指在此范围内,如果一旦失锁,系统还能再一次“锁住”。这是十分重要的。电动机起动后能否快速进入锁相状态,一旦失锁能否尽快恢复,这些性能与频相比较器选择有关,当然还与系统参数设置有关。
频相比较器的功能是产生正比于基准频率f.和反馈频率f的频差和相差的误差电压v。也就是说,当两频率尚未同步时,输出误差电压v。应正比于频差△f=f,一f。当频率相等时,ve应正比于两信号的相位差△φ。有许多方法可用于此目的。例如,线性乘法器、峰值检出器、平衡混频器等电路可以作为模拟型相位比较器,它们要求采用正弦波输人信号。另一类是数字型相位比较器,可接受方波或窄脉冲信号,其输出是脉冲信号,其脉宽与频差或相差有关。其后需要一低通滤波器(LPF),取此脉宽信号平均值作为正比于频差或相差的误差电压。简单的数字电路组成的相位比较器,如单个RS触发器、D触发器、异或门电路都有相位比较能力,且有良好线性,但它们没有鉴频能力,可能使系统锁定于基准频率的谐波频率上。目前使用的一种集成的频相比较器是由四个触发器和若干门电路组成,详见下节。
按基本框图构成单环直流电动机锁相环稳速系统,改变输入基准频率可实现速度调节。实践表明,此基准频率降低到某一数值后,系统可能是不稳定的。参考文献[22]研究了这个问题,给出了低速限制与环路参数的关系。电动机最低锁相工作转速Qmin理论值是

式中min——最低锁相工作转速(r/s);
fmin——最低锁相工作参考频率(Hz);N——分频系数;
n—一编码器条纹数;
K—-放大器和电动机联合增益Crad/(s·V)];
V,—相位比较器最大输出电压(V);T——电动机机械时间常数(s)。
例如,V=5V,当放大器和电动机的输入电压为1V时,产
生4rad/s电动机转速,即K=4rad/(s·V),编码器条纹数n=
500,电动机时间常数z=0.1s,计算出电动机锁相最低转速(此时N=1)为

实际试验中这个系统采用CD4046频相比较器,电动机带一惯性负载,总机械时间常数t=0.1s,在高速工作时,锁定状态良好,当基准频率减少到84Hz时,开始变得不稳定。对应此时的转速为0.17r/s,与理论计算值接近。
从上式可知,为了扩展低速端,应选择较多条纹数的编码器,适当加大惯性矩,使系统容易锁住。为了增大调速范围,在反馈通道中应当采用分频器。在高速时,用较大分频系数N。在PLL系统中,主要不是依靠改变基准频率来调速,而是以改变分频系数调速更为合理。
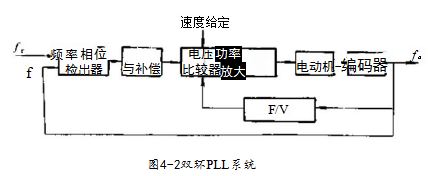
在一些PLL系统中,除数字锁相环作为主环外,还附加模拟量速度反馈环或电流反馈环,组成多环系统。图4-2为双环系统。其外环是锁相环,可看作位置伺服环,内环是速度环,模拟量速度信息直接由编码器信号经频率/电压(F/V)变换器得到。附加内环,使系统在有限的伺服增益下能减小系统静差,进一步提高系统稳定性和快速锁定能力。参见图4-21实用电路。
锁相环技术也可用于交流电动机高精度稳速控制。
原为通信系统使用的通用型锁相环、频相比较器集成电路,有些已被应用于电动机速度控制,如模拟型的NE565PLL集成电路,数字型的MC4044、MC14046、TC5810等PLL集成电路。作速度控制应用时,这些集成电路中有些部分,例如压控振荡器(VCO),是多余的,参见4.2节详述。
由于PLL技术在电动机速度控制中的推广应用,特别是在计算机外围设备办公室设备及音像设备中的应用,如高档电唱机、复印机、打印机、软盘和硬盘驱动器、光盘驱动器等大批量生产,促使电动机速度控制专用PLL集成电路开发生产与之相适应。在这些专用电路中,除了相位比较器、放大器之外,通常还包含石英振荡器和分频电路、反馈回路的波形形成电路和分频电路以及其他附加电路,使得只需少量外围元件即可构成一个完整的电机锁相稳速控制系统。从而使电动机PLL集成电路获得广泛应用。
表4-1部分国内外锁相环集成电路一览表
型号 | 生产厂 | 最高工作频率/MHz | 特点 | 工作电压/V | 封装 |
NE565 | Signetics |
0.5 | 相位比较器,VCO,低通滤波器 | 土12 |
DIP14 |
LM565 | Na1l.semi. | PLL | ±12 | DIP10 |
型号 | 生产厂 | 最高工作频窜/MHz | 特点 | 工作电压/V | 封,装 |
*MC4044 | MOTOROLA |
7 | 频相比较器,充电泵,放大器 |
5 |
DIPL4 |
MC4344 | 7 | 频相比较器 | 5 | DIPL4 | |
MC14046 |
1.4 | 双相位比较器。VC0 | 5~15 |
DIP16 | |
CD4046 | Harris | 0.8 | 5 | DIP16 | |
MM54HC4046 | Nat].Sernj. | 1.2 | 3~18 | DIP16 | |
J69] | 上无十四厂 | 0.8 | 5~15 | DIP16 | |
CD74HC4046 | Harris | 18、 | 5 | DIP16 | |
CD74HCT4046 | 18 | 5 | DIP16 | ||
74HC4046 | Philips | 18 | 5 | DIP16 | |
74HCT4046 | 18 | 5 | DIP16 | ||
UC3633 | Unitrode |
10 | 相位比较器,振荡器,反馈通道 |
12 |
DIP16 |
*UC3634 | 10 | 12 | DIP16 | ||
×UC3635 | 10 | 12 | DIP16 | ||
L6233 | SGS | 10 | 12 | DIP16 | |
MSM5810 | OKISemi. |
10 | 电唱机用电机PLL |
7 |
DFP16 |
MSM5814 | 0.1 | 电机PLL,双速 | 7 | DIP14 | |
MSM5816 | 12 | 15 | DIP16 | ||
MSM5819 | 8.5 | DIP18 | |||
#TC5081 | Toshiba | 通用相位比较器 | 4.5~8 | 9个引脚 | |
*TC9142 |
12 | 双8bitDAC鉴频鉴相 | 5~9.5 |
DIP16 | |
*TC9203 | 5~9.5 | DIP16 | |||
*TC9193 | 5~9.5 | DIP18 |
型号 | 生产厂 | 最高工作频率/MHz | 特点 | 工作电压/V | 封装 |
TC9192 | Toshiba | 6 | 双8bit[DAC鉴频鉴相 | 5~9.5 | DEP18 |
M51728 | Mitsubisbi | 电机PLL | 9~18 | DIP8 | |
TDA1533 | Philips | 5 | 11 | D[P18 | |
*CH5081 | 上无十四厂 | 同TC5081 |
随便看看
- 2024-09-27玉林R942型液压挖掘机动臂提升无力左回转缓慢
- 2025-01-17假想机器人
- 2024-11-11扭矩曲线
- 2024-11-08定压式涡轮增压的原理
- 2024-09-24直流电动机控制专用集成电路