
TDA5140/TDA5141/TDA5142T无转子位置传感器的无刷直流电动机控制器
由PHILIPS公司生产的TDA5140/TDA5141/TDA5142T无刷直流电动机专用集成电路系列,是一种双极型集成电路,适用于三相全波无刷直流电动机,不必采用霍尔元件或其他转子位置传感器,而是应用三相定子绕组在不励磁期间反电动势过零点作为转子位置的检测,实现换向控制。其中TDA5140和TDA5141内部已包含驱动级,可直接驱动电机绕组。TDA5140A和TDA5140AT有600mA驱动能力,TDA5141驱动能力达1.5A,可用来驱动硬磁盘、风扇等。而TDA5142T则只提供
150mA驱动电流,用来驱动外接功率MOSFET或双极晶体管,以适应较大功率的电动机的驱动要求。为了获得每相绕组反电动势信号,必须从电动机中引出三相星形绕组的中点,这是应用这些电路对电动机附加的要求。下面以TDA5142T为例给予详细介绍。
1.特点
·利用电动机相绕组反电动势提供换相信号,不必专门安置转子位置传感器
·内设有起动电路
·优化换相顺序,使不同电动机和负载下都可工作·三相六步全波换相工作方式
·电机三相绕组星形联结,应有中点引出·输出电流限制和过热保护
·利用电机反电动势信号产生精确测速频率信号·有制动功能
·内设独立的高输出电流运算放大器,可用作控制放大器,或供开关式功率电源(SMPS)驱动的电平转换用。
2.引脚功能说明及限制数据TDA5142T的引脚功能说明见表3-14和图3-43。
表3-14TDA5142T引脚功能说明
引脚号 | 符号 | 功能说明 |
1 | OUT-NB | B相驱动输出,驱动N沟道功率MOSFET或NPN晶 |
2 |
OUT-PB | 体管 B相驱动输出、驱动P沟道功率MOSFET或PNP晶体管 |
3 | GND1 | 驱动输出级的地 |
4 | OUT-PC | C相驱动输出,驱动P沟道功率MOSFET或PNP晶体管 |
5 | OUT-NC | C相驱动输出,驱动N沟道功率MOSFET或·NPN晶体管 |
(续) | ||
引脚号 | 符号 | 功能说明 |
6 | VMOT | 驱动输出级的电源电压 |
7 | TEST | 试验输人/输出 |
8 | BRAKE | 制动输入指令 |
9 | FG | 转速 |
10 | GND2 | 控制电路的地 |
11 | V | 电源(+5V) |
12 | CAP-CD | 自适应换向时延外接电容的接点 |
13 | CAP-DC | 自适应换向时延外接电容的接点 |
14 | CAP-ST | 起动振荡器的外接电容接点 |
15 | CAP-T1 | 定时器外接电容接点 |
16 | +OTAIN | 放大器同相输入端 |
17 | -OTAIN | 故大器反相输入联 |
18 | OTAOUT | 放大器输出端(集电极开路) |
19 | COMP-A | 反电动势比较器、A相输人端 |
20 | COMP-B | 反电动势比较器,B相输入端 |
21 | COMP-C | 反电动芬比较器,C相输入端 |
22 | MOTO | 接电机星形联结绕组中点 |
23 | OUT-NA | A相驱动输出,驱动N沟道功率MOSFET或NPN晶体管 |
24 | OUT-PA | A相驱动输出,驱动P沟道功率MOSFET或PNP晶体管 |
主要限制数据:
电源电压Vp:4~18V
VMOT电压VVMOT:3~18V
COMP-A、B、C和MOTO间电压范围:-0.5~VVMOTOUT-N、OTU-P输出电流限制:<150mA
3.基本构成与工作原理如图3-43所示,TDA5142T的主
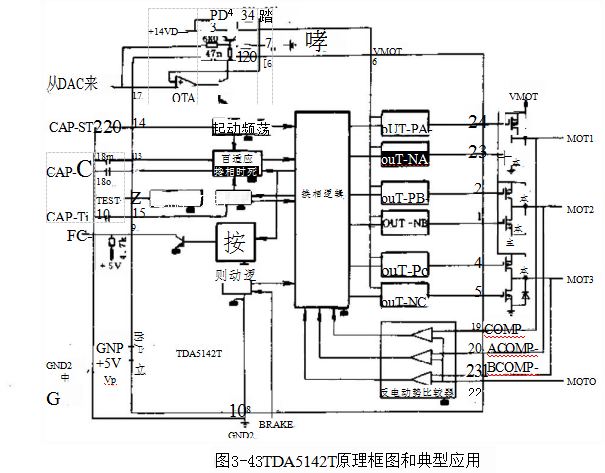
要组成包括换相逻辑、驱动输出级、反电动势比较器、独立运算放大器(OTA)。还有起动振荡器、自适应换相时延电路、定时器,它们可由外接电容器来整定。此外,还有一个转速输出级和一个过热保护电路。
在图3-44换相波形示意图所示的任一个换相周期内,无刷直流电动机的三相绕组接至功率级输出端MOT1、MOT2和MOT3,每个输出端有三种可能的状态:高电压(HIGH)态,绕组接到电源正端,有电流流入;低电压(LOW)态,绕组接到电源地端,有电流流出;高阻态(F)。对任一相绕组,高阻态出现在高电压态和低电压态中间,此时绕组处于不激励状态,绕组反电动势即可由电路中的反电动势比较器检测,三个反电动势比较器信号由换相逻辑选择。在一个周期内,三个绕组中必有两个绕组分别处于高电压态或低电压态,只有一个绕组处于高阻态,它的反电动势过零点被检测作为转子位置信号,控制绕组的换相。
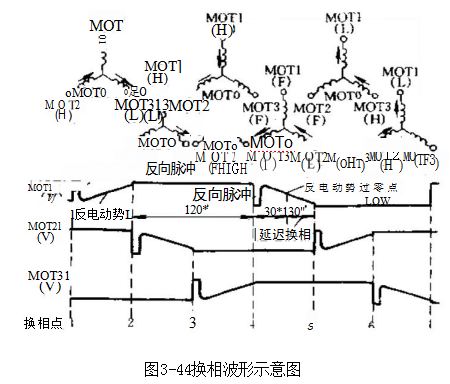
但是要注意的是,反电动势过零点与下一个理论的换相时刻
相差30°(电角度)。这个时间间隔由外接于CAP-CD和CAP-DC
的电容测定和存储,它的放电过程由换相逻辑进行采样,以确定出一个预定的换相时延。由换相逻辑选通反电动势比较器,以确定哪一相绕组反电动势的过零点被选用,并用来得到下一个换相点的正确时刻。由自适应换相时延电路按电机负载大小计算出正确的换相时延。
反电动势过零点亦被用来提供电机的转速信息,它被转换成正比于转速的频率信号FG,从9脚输出,送上级微型计算机。
驱动输出级还设有限流电路和过热保护电路。
系统的上述功能只有在电动机旋转起来后产生一定的反电动势幅值时才能实现。为了使电动机能正确起动,本集成电路设置了起动振荡器,产生起动必需的换相脉冲指令信号,让电动机以步进电机方式起动。
定时器的功能是作为内部定时和电动机反转检测的定时。4.外接电容的选择
(1)CAT-ST起动电容:起动电容决定了起动振荡器的振荡频率。此电容以2μA.电流在0.05~2.2V之间充放电。一个完整的振荡周期tsarn由下式确定:
starr=2.15C(s)
式中C—接至14脚的起动电容(μF)。
起动振荡器仅在电动机起动时起作用,一旦有一个换相脉冲产生,起动振荡器就停止工作。每个起动脉冲都引起输出级从一个状态转换到下一个状态,使电动机转动。如果电动机的转动能产生足够大的反电动势,电路立即转换到无刷直流电动机方式工作,正常运转。如果反电动势幅度还不够,电动机再转一步,并在新位置附近振荡。振荡幅度应逐渐衰减,直至下一个起动脉冲到来,再走下一步。这样可以避免在不合适的相位时走下一步。电动机振荡频率由下式确定:
式中f———电动机振荡频率(Hz);
K.——电动机转矩常数(N·m/A);
1--电流(A);
p—-电动机极对数;
J——转子转动惯量(kg·m²)。
例如,J=72×10-⁶kg·m²,K.=25×10-³N·m/A,p=6,
I=0.5A,得f=5Hz。如果系统阻尼强,可选择起动频率为2Hz,即tiart=0.5s。求得C=0.25μF,取为220nF。
(2)CAP-CD、CAP-DC自适应换相时延电路电容:这两个电容的值决定了最佳换相时刻,它与电动机的型号和负载大小有关。在时延电路中,在一个换相周期CAP-CD被充电,在下一个换相周期放电。放电电流是充电电流的2倍。充电电流为8.1μA,放电电流为16.2μA。电压范围为0.9~2.7V。此电容以nF为单位时,它与换相频率f的关系为

在低于正常换相频率的较低频率工作时,电容以20μA电流从2.2V放电到0.9V,这决定了反电动势过零点后的一个换相时延。本电路最大时延等于0.076C。
例如,正常工作频率为900Hz,最低使用换相频率f=400Hz时,两个时延电容取
实际如图3-43取值为18nF。
(3)CAP-T1定时电容:定时电路给本系统提供定时信号,将一个换相周期内划分出足够数量的步,这些步包括了一些内部时延。
最重要的功能是监视定时(watchdogtime).在这时间,一相绕组反电动势从负的二极管脉冲电压恢复为正的反电动势,或者从正的二极管电压恢复为负的反电动势。监视定时器的预防功能
是,当在预定时间内期望的事情没有出现时要起作用。如果电动机是正常运转,反电动势会在短时间内出现。可是,如果电动机起动不正常,不转动或者反向转动,反电动势出现时间要很长。监视定时的选择应当这样,对于不出现反电动势时,它是足够的长,而对于检测出电动机反转,它是足够的短。如果监视定时过长,电动机也许会在错误的方向旋转,此时转矩很小。
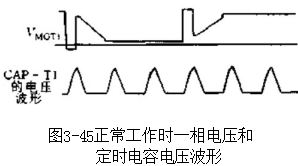
定时电容以57μA从0.2充电到0.3V,超过0.3V以后,再以5μA充电到2.2V,定时电容电压波形见图3-45。此时,反电动势仍然为负。一旦反电动势恢复为正,电容则以28μA电流放电。监视定时时间就是此电容从0.3V充电到2.2V的时间。
定时时间tm(ms)与定时电容Cm(nF)的关系如下式所示:Cm=2.63tm
例如,一相绕组在开关断开后,正反电动势以3.5ms下降到
20mV(反电动势比较器的偏置电压),需要的定时电容值是Cm=2.63×3.5nF=9.2nF
选取Cm=10nF。
5.FG信号利用电机三个绕组反电动势过零点和换相信号产生测速频率信号FG。FG信号的下降沿对应于反电动势过零点,上升沿对应于换相点。例如,一台三相电动机,6对极,在1500r/min时,FG信号和换相信号有相同频率,即
f=25×6×6Hz=900Hz
6.电动机的控制利用本集成电路内的独立运算放大器OTA可对电动机进行模拟方式或数字(PWM)方式控制。OTA
和一般的运算放大器相似,有同相和反相输入端。它的输出是集电极开路晶体管,吸收电流能力为40mA,共模输入范围从地到Vp--0.7V。
图3-43是利用OTA作模拟控制的示例。FG速度控制信号送微处理器,后者发出控制信号经D/A转换后,送至OTA输人。OTA作为控制放大器控制外接晶体管BD434,从而控制6个驱动输出。外接逆变桥是由P和N沟道的MOSFET组成。MOT1、2、3、0分别接三相绕组及其中点。3脚和10脚接公共地。
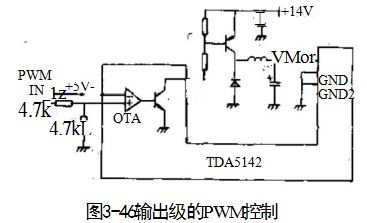
图3-46是速度数字控制电路。外来PWM信号从17脚输入。OTA作为电平转换,控制外接晶体管。这里需要指出的是,不能像一般直流电动机PWM控制那样,将PWM电压直接加至电动机绕组。否则PWM信号会严重干扰反电动势波形,使过零点无法检出。所以,经外接晶体管放大后,接电感和电容组成的滤波器,以一电平控制该集成电路VMOT电源端。也就是说,电动机绕组仍然是受模拟方式控制的。
电动机的制动由8脚执行。8脚电压低于2.3V时,电动机制动;浮地或大于2.7V时,电动机正常工作。
随便看看
- 2025-01-02日立EX90挖掘机无回转故障的检查诊断
- 2024-09-23管接头-液压传动基础知识
- 2025-01-14直流电动机控制专用集成电路
- 2024-11-05电子调速器
- 2024-10-30调速器的速度调定方法