
UC3625三相无刷直流电动机控制器
UC3625用于三相无刷直流电动机控制,它直接驱动外接MOSFET或达林顿晶体管,方便地构成一个完整的电动机控制系统。本电路可完成有固定频率的PWM控制、闭环速度控制和制动控制,并且有噪声抑制、安全正反转、防止上下桥臂直通等保护功能。尽管规定电路使用电源电压是10~18V,但用来控制更高电压的电动机也是可能的。
1.特点
·直接驱动MOSFET或功率达林顿晶体管构成的三相逆变桥
·驱动高端桥臂的输出晶体管集电极开路,耐压50V·软起动
·高速电流传感放大器·每脉冲周期限流控制·过电压和欠电压保护·安全正反转控制
·测速信号输出
·防止上下桥臂直通的保护·两象限或四象限运行
·5V参考电压
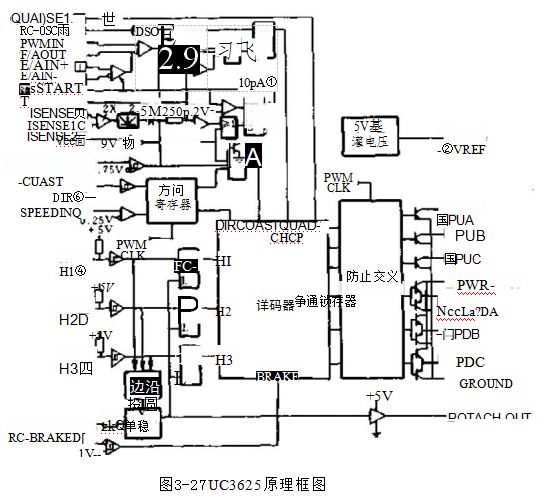
2.引脚功能说明该IC采用28脚双列直插封装。最大允许使用电源电压20V。原理框图见图3-27。
引脚6、7(DIR、SPEEDIN):译码器逻辑将输入的霍尔传感器信号和DIR(方向)信号译码成正确的驱动信号输出(上侧驱动信号PUA、PUB、PUC和下侧驱动信号PBA、PBB、PBC)。为了避免突然正反转造成输出级的危险,DIR首先进入方向寄存器(directionlatch),它是一个2bit移位寄存器。此寄存器以PWM振荡器频率为时钟,所以方向改变总是要延时1~2个时钟周期,如果时钟频率是40kHz,延时为25μs或50μs。
如果SPEEDIN信号高于250mV,方向寄存器被禁止。通常用TACH-OUT信号经滤波器接SPEEDIN脚,只有电动机转速降到比较低时,方能改变电动机转向,不致危及输出级。
此外。电路还对方向寄存器的输出和输入进行检测,当两信号不一致时,发出禁止信号给输出驱动级,此时令电动机惯性滑行,滑行至安全速度后才允许反转。
引脚1、28、27、26(E/AIN+、E/AIN一、E/AOUT、PWMIN):E/AIN+、E/AIN-和E/AOUT是误差放大器的输入和输出脚,它可以用于电流控制、转速控制、系统补偿等多种不同用途。E/AOUT和PWMIN是PWM比较器的输人。在电压型PWM系统中,PWMIN可连接到RC-OSC端(25脚)。PWM比较器输出送PWM触发器复位端。
引脚8、9、10(H1、H2、H3):这三个是电动机霍尔位置传感器输入端。霍尔集成电路的电源可用2脚的VREF端。三传感器空间间隔应是120°电角度。如果有传输带来的噪声,可用6V的稳压管和1k2、2000pF的RC滤波器解决。
引脚4、5、3(ISENSE1、ISENSE2、ISENSE):差动输入的电流放大器增益约等于2。输出与输入关系如下式:
ISENSE=2.5V+2×〔ISENSE1-ISENSE2〕
输出接过电流比较器,当电动机电流超过0.3V/R,时,比较器翻转,输出驱动闭锁。R₅是电流检测电阻。如果要求软起动,起动过程中电流限制在安全范围内。
引脚14、13、12(PDA、PDB、PDC):这三个输出端驱动三相桥下侧开关管,它们的驱动电流为0.5A,可直接驱动N沟道MOSFET或采取限流措施后驱动功率达林顿晶体管的基极。
引脚18、17、16(PUA、PUB、PUC):这三个输出是集电极开路,用以驱动三相桥上侧开关管,直接驱动P沟道MOSFET
或PNP晶体管。通过电平移动电路、光耦或变压器耦合方法,驱动高电压大电流开关。
引脚22(QUADSEL):该ICPWM斩波控制有两种方式供选择:一种是两象限方式(QUADSEL低电平);另一种是四象限方式(QUADSEL高电平)。对于前者,PWM斩波信号只用来控制下侧开关,下侧开关截止时,绕组电流通过上侧开关和上侧二极管形成的回路续流。对于后者,PWM斩波信号同时控制上侧和下侧开关,续流回路是经过下侧二极管和上侧二极管。两象限方式通常有较高效率,而四象限方式,特别是在低负载电流时,对电流控制更好,推荐用于有快速加减速要求的伺服控制系统中。
引脚21(RC-BRAKE):该引脚有两个作用。本引脚和地之间并电阻Rr和电容Cr,TACH-OUT脉冲宽度T约为
T=0.67RTCT
推荐取R=10~500kΩ,Cr=1~100nF,对应的T=5μs~10ms。另一个作用是本引脚的电位若低于1V,即进入制动方式。
引脚25(RC-OSC):该IC用一固定频率PWM来调节电动机电流。PWM频率由RC-OSC引脚所接的电阻Rosc和电容Cosc决定。
电阻的另一端接VREF脚,电容另一端接地。推荐Rosc=10~100kΩ,Cosc=1~100nF。该引脚的电压波形是锯齿波,峰-峰值为1.2V,平均值为1.6V。
利用这个振荡器和电路内的PWM触发器、PWM比较器、误差放大器,以及有关引脚25、26、27、1、28的不同接法,可以实现电压型或电流型PWM控制、转速调节、电流平均值的调节或峰值限制调节、固定(FF时间PWM的电流调节等。
引脚24(SSTART):通常有一电容接SSTART脚和地。SSTART与内部比较器及一安全起动RS触发器连接。如果电源Vcc降低到9V的阈值以下,或者电动机电流大于规定过载电流,该触发器被置位,驱动图中NPN晶体管使SSTART脚上的电容放电,比较器翻转使触发器复位。如果此时故障已消失,NPN晶体管截止,电容重新充电。由于SSTART信号对误差放大器的输出钳位。当电动机出现过电流等故障时,PWM比较器令PWM触发器输出为零,电动机被关断。电动机起动或故障消失后再起动,SSTART电容缓慢充电上升,误差放大器输出随之上升,实现了安全起动功能(又称软起动)。
引脚20(TACH-OUT):由H1、H2、H3输入位置信号,经边沿检测(EDGEDETECT)电路和单稳电路后,从20脚输出TACH-OUT,它是一个峰值为5V固定宽度的脉冲。它的平均值正比于电动机转速。这个输出经滤波电路后即可作为测速反馈信号使用。
此外,本电路在输出级设有防止三相桥同一桥路上下开关直通的保护电路,它保证上下侧两个开关中任一开关关断后至少经过两个PWM信号周期的时间后,另一开关方会导通。
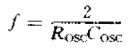
3.应用示例图3-28是45V/8A无刷直流电动机的驱动电
路图。它是电压型开路控制,由1脚外接可调电位器调整PWM的占空比,控制供给电动机的平均电压,从而调节转速。图中只表示了三相桥的一路,由16脚(PUC)和12脚(PDC)分别驱动
P沟道和N沟道的MOSFET。用两个电流检测电阻RT和R,,使
电路可运行于四象限方式,可进行制动控制,并得到平均电流控制。
表3-8UC3625换相真值表
输人 | 输出 | ||||||||
D1R | H1 | H2 | H3 | LOW-SIDE | HIGH-SIDE | ||||
6 | 8 | 9 | 10 | 12 | 13 | 14 | 16 | 17 | 18 |
1 | 0 | G | 1 | L | H | L | L | H | H |
输入 | 输出 | ||||||||
DIR | H1 | H2 | H3 | LOW-SIDE | HIGH-SIDE | ||||
6 | 8 | 9 | 10 | 12 | 13 | 14 | 16 | 17 | 18 |
1 | 0 | 1 | 1 | L | L | H | L | H | H |
1 | 0 | 1 | 0 | L | L | H | H | L | H |
1 | 1 | 1 | 0 | H | L | L | H | L | H |
1 | 1 | 0 | 0 | H | L | L | H | H | L |
1 | 1 | 0 | 1 | L | H | L | H | H | L |
0 | 1 | 0 | L | L | L | H | H | L | H |
0 | 1 | 0 | 0 | L | L | H | L | H | H |
0 | 1 | 1 | 0 | L | H | L | L | H | H |
0 | 0 | 1 | 0 | L | H | L | H | H | L |
0 | 0 | 1 | 1 | H | L | L | H | H | L |
0 | 0 | 0 | 1 | H | L | L | H | L | H |
× | 1 | l | ] | L | L | L | H | H | H |
× | 0 | 0 | 0 | L | L | L | H | H | H |
随便看看
- 2024-09-14平头螺丝、螺母的紧固扭矩-挖掘机点检整备篇
- 2024-12-06手动换向阀的故障排除与修理
- 2024-12-12卸荷回路的故障分析与排除
- 2024-09-29醇类用作柴油发动机燃料
- 2024-12-26柴油机水箱漏水原因的判断