
UDN2936三相无刷直流电动机控制-驱动器
UDN2936是适用于三相无刷直流电动机驱动的专用集成电路,它包括了换相逻辑和功率驱动。末级驱动输出额定值为45V、2A,峰值为3A。采用特殊的12脚单列封装,外壳接地,需装于散热器上。当电动机的转子位置传感器间距为60°或120°时,分别选用UDN2936W或UDN2936W-120。
1.特点
·对单端式或差动式霍尔传感器兼容
·末级输出端带钳位二极管·方向控制
·PWM电流控制
·动态制动·过热保护
2.工作原理说明该集成电路见图3-29,它由下列五部分组成:换相逻辑、输出驱动、PWM电流限制、方向控制和制动、过热保护。
·换相逻辑:引脚9、8、7接收从电动机转子位置传感器来的信号,它可与单端线性霍尔IC或开关式霍尔IC接口。内部有上拉电阻,以适应集电极开路的开关式霍尔IC。输入电路还设置有2.5V的门槛电压。
位置传感器信号经换相译码后在输出端OUTA、OUTE、OUTc输出,参见真值表表3-9每个输出可能有三种状态:高电压态(1)、低电压态(0)、高电阻态(Z)。
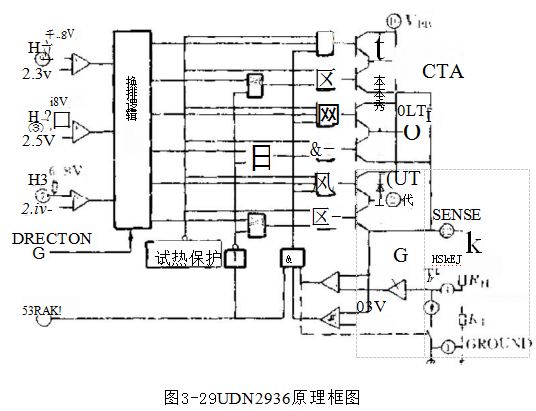
·输出驱动:输出级为达林顿晶体管,其连续的灌电流和抽电流能力为2A,饱和压降低于2V。其上并有高性能二极管,为换相和斩波工作提供续流通道。
表3-9UDN2936W-120真值表
蛋尔传感器 |
DIR |
BRAKE | 输出 OUTAOUTeOUTc | ||||
H1 | H2 | H3 | |||||
1 | 0 | 1 | 0 | 1 | Z | ( | 1 |
1 | 0 | 0 | 0 | 1 | 1 | 0 | Z |
1 | 1 | 0 | 0 | 1 | 1 | Z | 0 |
0 | 1 | 0 | 0 | 1 | Z | 1 | 0 |
0 | 1 | 1 | 0 | 1 | C | 1 | Z |
0 | 0 | L | 0 | 1 | C | Z | 1 |
1 | 0 | 1 | 」 | Z | 1 | 0 | |
1 | 0 | 0 | 1 | 1 | 0 | 1 | Z |
1 0 | 1 1 | 0 0 |
| 1I | 0Z | Z0 | 1 1 |
0 | 1 | 1 | 1 | 1 | 1 | 0 | Z |
0 | 0 | 1 | 1 | 1 | 1 | Z | 0 |
× | × | × | × | 0 | 0 | 0 | 0 |
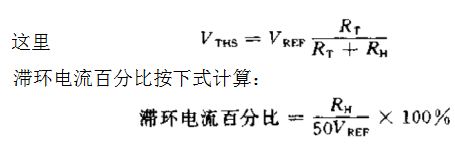
·PWM电流限制:12脚外接电阻R,其上流过电动机绕组电流,通过内部的两个比较器进行电流监视。比较器输出控制上桥臂的功率开关晶体管(灌电流开关)。当电流超过预定的限制电流Iim时,比较器输出翻转,使上桥臂开关关断,此时电动机绕组电流在续流通道(二极管一绕组—下桥臂开关—R,)中流过。比较器有规定的滞环,当电流衰减到规定的百分比之后,比较器又再翻转复位,使上桥臂开关重新开通。从而实现对绕组电流的脉宽调制(PWM),电流限定在某一限定值上。限制电流Ilim。由比较器的门槛电压决定。上比较器同相输入端前有1:10的衰减。下比较器是内部已设置0.3V的门槛电压。当外设4脚电压>3V时,下比较器起作用,限制电流为

其滞环电流为7.5%Iim,是固定的。当4脚电压VTHS(门槛电压)<3V时,上比较器起作用。限制电流为
利用两个比较器,两个
限制电流,方便地控制电动IsTART十机的起动电流IsTART和运行电流IRUN。当电动机起动时,4脚电压VTHs>3V,过若干时间后,把VTHs降低到小于3V的一个合适电平上,参见图3-30。
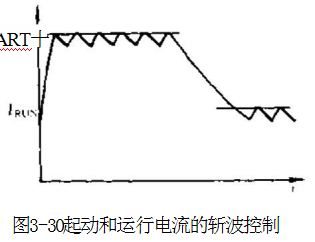
电流斩波控制的斩波
频率由电路参数(包括绕组电感、电阻、电源电压、滞环和开关器件的速度等)决定。
·方向控制与制动控制:改变6脚电平可实现转向的改变。正在运转的电动机突然反转时,同一路上下桥臂晶体管互换其状态,由ON变为OFF,由OFF变为ON。开关关断时间往往长于接通建立时间,会出现上下桥臂直通危险。为此,电路设有死区时间,约2μs。
5脚施加低电平时,三个下桥臂开关为ON,上桥臂开关全为OFF,电动机三相绕组短接在一起并接地。此时反电动势可能产生相当大的电流,实现动态制动。此电流有可能接近电动机堵转电流。由于此时电流限制电路已不能起作用,必须注意使此电流不超过允许的峰值电流3A。突然反转时,也有此问题,需注意。
·过热保护:该电路内部过热保护功能在末级驱动开关温度超过165℃时动作,下降到25℃后恢复正常。
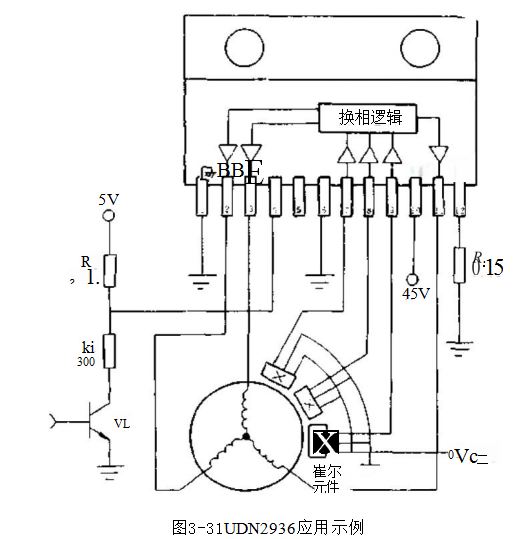
3.应用示例如图3-31所示,利用UGN3113U集电极开路开关型霍尔集成电路作位置传感器。限流电路设有晶体管V₁,并
取R₂=1.5kΩ,R₁=3000,VREF=5V,R=0.152。当V为OFF时,电动机开始起动,限制电流为2A。然后控制V,为ON,运转电流限制为0.67A。
电动机转速可以用电流限制来控制,即调节VPEF大小来调节转速。
随便看看
- 2024-10-18发动机的数学模型
- 2024-09-13更换电瓶时的注意事项-挖掘机安全使用维护手册
- 2024-09-14装载作业-挖掘机驾驶操作篇
- 2024-09-14点检橡胶履带板(橡胶履带板规格车辆)-挖掘机点检整备篇
- 2024-12-16液压系统空气进入和产生气穴