
MC33033/MC33034/MC33035无刷直流电动机 控制器和MC33039电子测速器
MC33033/MC33034/MC33035是MOTOROLA公司称之为第二代的无刷直流电动机控制器专用集成电路系列。外接功率开关器件后,可用来控制三相(全波或半波)、两相和四相无刷直流
电动机,还可以用作有刷直流电动机的控制。加上一片MC33039.电子测速器作F/V转换,引入测速反馈后,可构成闭环速度调节系统。
1.MC33035无刷直流电动机控制器本集成电路的主要组成部分包括:
·转子位置传感器译码器电路·带温度补偿的内部基准电源·频率可设定的锯齿波振荡器·误差放大器
·脉宽调制(PWM)比较器
·输出驱动电路
·欠电压封锁保护、芯片过热保护等故障输出·限流电路
该集成电路的典型控制功能包括PWM开环速度控制、使能控制(起动或停止)、正反转控制和能耗制动控制,适当加上一些外围元件,可实现软起动。
MC33035采用24脚DIP塑料封装。其引脚功能说明见表3-
5,原理框图见图3-17。
MC33034与MC33035有相同的功能,为适应不同的无刷直流电动机的各相传感器之间相位差的不同,提供两种不同规格产品:MC33034P60适合相位差为60°或300°,MC33034P120则适合相位差为120°或240°。MC33034的15脚为控制部分的地,其电流检测比较器反相输入端没有引出。22脚为空脚。
MC33033是将MC33035部分功能省去的较低价格的无刷直流电动机控制器。它是20脚塑封封装。它将Vc和Vc电源合为一个引脚,没有制动输入和故障信号输出,电流检测比较器反相输入端没有引出。其他功能与MC33035相同。它的引脚表见表3-6。
2.MC33035功能说明
(1)转子位置传感器译码电路:该译码电路将电动机的转子位置传感器信号转换成六路驱动输出信号,三路上侧驱动输出和
三路下侧驱动输出。它适合于集电极开路的霍尔集成电路或光耦合电路等传感器。输入端4、5、6脚都设有提升电阻,输入电路与TTL电路电平兼容,门槛电压为2.2V。该集成电路适用于传感器相位差为60°、120°、240°、300°四种情况的三相无刷电动机。
表3-5MC33035引脚功能说明
|
引脚号 |
符号与功能 |
功能说明 |
|
1,2、24 |
BT,AT,Cr |
集电极开路输出,可用来驱动三相桥上侧三个功率开关。最大允许电压为40V.最大吸入电流为50mA |
|
3 |
正向/反向 |
改变电动机转向 |
|
4,5,6 |
SA,SB,Sc |
转子位置传感器输入端 |
|
7 |
使能控制 |
逻辑高电平使电动机起动,逻辑低电平使电动机停车 |
|
8 |
基准电压输出 |
典型值6.24V |
|
9 |
电流检测输入 |
电流检测比较器的同相输入端 |
|
10 |
振荡器 |
由外接定时元件RT和CT决定其振荡频率 |
|
11 |
误差放大器输入 |
同相输入端 |
|
12 |
误差放大器输入 |
反相输入端 |
|
13 |
误差放大器输出 |
在闭环控制时连接校正阻容元件。此引脚亦连接到内部PWM比较器反相输入端 |
|
14 |
故障信号输出 |
集电极开路输出,故障时输出低电平 |
|
15 |
电流检测输入 |
反相输入端 |
|
16 |
地 |
|
|
|
Vcc |
供给本集成电路的正电源,10~~30V |
|
18 |
Vc |
给下驱动输出提供正电源,10~30V |
|
19,20,2 |
CB,Bg,AB |
下侧驱动输出端 |
|
22 |
60°/120°选择 |
高电平对应传感器相差60°,低电平对应传感器相差120° |
|
23 |
制动输入 |
逻辑低电平使电动机正常运转,逻辑高电平使电动机制动减速 |
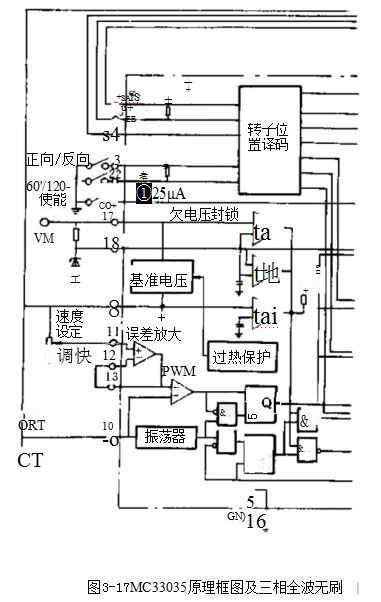
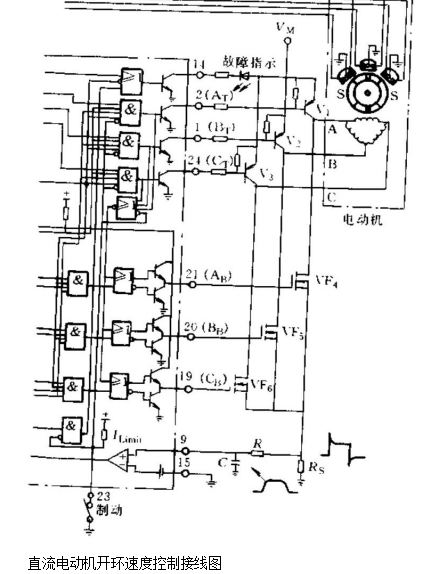
表3-6MC33033引脚功能说明
|
引脚号 |
符号与功能 |
|
1、2、20 3 4,5、6 7 8 9 10 11 12 13 14 15.16,1718 19 |
BT,AT,CT正向/反向SA,Sg,Sc 基准电压输出振荡器 误差放大器同相输入端误差放大器反相输入端误差放大器输出 电流检测比较器同相输人端地 Vc10~30V CB,Bg,AB 60/120°选择使能控制端 |
由于3个输入逻辑信号,原则上可有8种逻辑组合。其中6种正常状态决定了电动机6个不同的位置状态。其余2种组合对应于位置传感器不正常状态,即3个信号线开路或对地短路状态,此时14脚将输出故障信号(低电平)。
用3脚逻辑电平来确定电动机转向。当3脚逻辑状态改变时,传感器信号在译码器内将原来的逻辑状态改变成非,再经译码后,得到反相序的换向输出,使电动机反转。
电动机的起停控制由7脚使能端来实现。当7脚悬空时,内部有40μA电流源电流使驱动输出电路正常工作。若7脚接地,三个上侧驱动输出开路(1状态),三个下侧驱动输出强制为低电平(0状态),使电动机失去激励而停车,同时故障信号输出为零。
当加到23脚上的制动信号为高电平时,电动机进行制动操作。它使三个上侧驱动输出开路,下侧三个驱动输出为高电平,外接逆变桥下侧三个功率开关导通,使电动机三个绕组端对地短接,实现能耗制动。芯片内设一个四与门电路,其输入端是23脚的制动信号和上侧驱动输出三个信号,它的作用是等待三个上侧驱动输出确实已转变为高电平状态后,才允许三个下侧驱动输出变为高电平状态,从而避免逆变桥上下开关出现同时导通的危险,其控制真值表见表3-7。
表3-7三相六步控制真值表
|
输 |
入 |
输出 |
||||||||||
|
位置传感器信号 |
正向! 反向 F/R |
使能Enahle |
制动Brake |
电流 检测CutreptSense |
上侧驱动
ATBTCT |
!下侧驱动
AsBsCB |
故障输出FauF |
|||||
|
60°SASBSc |
120°SASgSc |
|||||||||||
|
100 |
100 |
1 |
1 |
0 |
0 |
01 |
介01 |
|||||
|
110 |
1」0 |
1 |
1 |
0 |
0 |
10 |
001 |
1 |
||||
|
1]1 |
010 |
1 |
1 |
0 |
0 |
201 |
100 |
1 |
||||
|
011 |
01 |
1 |
1 |
0 |
0 |
110 |
100 |
1 |
||||
|
001 |
001 |
1 |
[ |
0 |
0 |
20 |
0I0 |
] |
||||
|
000 |
10 |
1 |
1 |
0 |
0 |
01 |
01( |
1 |
||||
|
100 |
00 |
0 |
1 |
0 |
了}0 |
100 |
1 |
|||||
|
110 |
10 |
0 |
1 |
0 |
0 |
10 |
010 |
] |
||||
|
111 |
010 |
0 |
1 |
0 |
0 |
01 |
010 |
} |
||||
|
01 |
01 |
0 |
l |
011 |
001 |
J |
||||||
|
00] |
002 |
0 |
1 |
0 |
0 |
101 |
00 |
1 |
||||
|
000 |
10 |
0 |
0 |
0 |
10L |
100 |
1 |
|||||
|
10 00 |
000 11 |
××
:<×X |
X×0上0 |
0 0 0 1 1 0 |
××() 0 1 1 |
】
1I11 |
11111l |
1 1
I1l |
0 0 0
0 |
0 0 0}」 |
0 0 0
0 |
0 0 0 1 0 0 |
注:√--传感器正常逻辑状态;×--0或I。
(2)误差放大器:该芯片内设有高性能、全补偿的误差放大器。在闭环速度控制时,该放大器的直流电压增益为80dB,增益
带宽为0.6MHz,输入共模电压范围从地到VREF(典型值为6.25V),可得到良好性能。作开环速度控制时,可将此放大器改接成增益为1的电压跟随器,即速度设定电压从其同相输入端11脚输入。12-13脚短接。
(3)锯齿波振荡器:内部振荡器振荡频率由外接定时元件CT和RT决定。每个振荡周期由基准电压VREF(8脚)经RT向CT充电,然后CT上电荷通过内部一晶体管迅速放电而形成锯齿波振荡信号。其波峰和波谷分别为4.1V和1.5V。建议使用振荡器频率为20~30kHz,以兼顾过低则可闻噪声和过高则影响功率开关效率的矛盾。
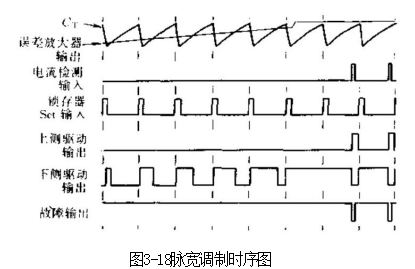
(4)脉宽调制器:除非由于过电流或故障状态使六个驱动输出闭锁,在正常情况下,误差放大器输出与振荡器输出锯齿波信号比较后,产生脉宽调制(PWM)信号,控制三个下侧驱动输出。改变输出脉冲宽度,相当于改变供给电动机绕组的平均电压,从而控制其转速和转矩。脉宽调制时序图见图3-18。
(5)电流限制:外接逆变桥经一电阻Rs接地,作电流采样。采样电压由9和15脚输入至电流检测比较器。比较器反相输入端设置有100mV基准电压,作为电流限流基准。在振荡器锯齿波上
升时间内,若电流过大,此比较器翻转,使下RS触发器重置,将驱动输出关闭,以限制电流继续增大。在锯齿波下降时间,重新将触发器置位,使驱动输出开通。利用这样的逐个周期电流比较,实现了限流。若允许最大电流为Imax,则采样电阻按下式选择:

为了避免由换相尖峰脉冲引起电流检测误动作,在9脚输入前可设置RC低通滤波器。
需要注意,在制动工作时,电动机绕组短路电流只流过下桥臂的开关晶体管,并没有流过采样电阻。因此本电流限制电路并不能为制动工作提供限流保护。如果需要采用制动运行方式,必须为此而选择足够大峰值电流的功率开关管。
(6)欠电压保护:内设欠电压保护电路,在下列三种情况下,关闭驱动输出:本芯片电压Vcc不足、Vc不足(典型值低于9.1V),基准电压不足(典型值低于4.5V),以保证芯片内部全部工作正常和向下侧驱动输出提供足够的驱动电压。从图3-17可见,欠电压保护没有锁存功能,当电压恢复正常后,系统会自动恢复正常。欠电压保护是由三个电压比较器来实现的。
(7)故障信号输出:14脚是故障信号输出端,它的集电极开路NPN晶体管吸入电流能力为16mA,可直接驱动LED作故障显示,也可以与微处理机接口。
14脚输出低电平是表示下列情况之一的故障:
·不正常的位置传感器输入状态
·电流检测端输入电压大于100mV·三种欠电压之一
·内部芯片过热,典型值超过170℃·使能端(7脚)为逻辑0状态
本芯片内没有故障锁存,若要锁存故障状态,可采取这样的接法,即将14脚接至7脚。还可参照闭环控制示例图(图3-23)、
引入R₁₀和C₆实现故障的延时锁存,延时时间由此定时元件时间
常数决定。C₆旁的按键是用来解除故障锁存状态的复位键。
(8)驱动输出:三个上侧驱动输出(1、2、24脚)是集电极开路NPN晶体管,吸入电流能力为50mA,耐压为40V,可用来驱动外接逆变桥上桥臂的NPN功率晶体管和P沟道MOSFET功率管。三个下侧驱动输出(19、20、21脚)是推挽输出,电流能力为100mA,可直接驱动NPN晶体管和N沟道功率MOS-FET。下侧驱动输出的电源Vc由18脚单独引入,与供给电动机的电源Vcc分开。为配合标准MOSFET栅漏电压不大于20V的限制,18脚上宜接一个18V稳压二极管进行钳位。
3.三相全波六步无刷直流电动机开环速度控制如图3-17所示,外接三相逆变桥是由PNP晶体管和N沟道功率MOSFET构成,它们内部的续流快速恢复二极管,在每个PWM周期功率管关断时,将绕组电感中能量反馈回功率电源。逆变桥可连接绕组为三角形联结或星形联结的电动机。
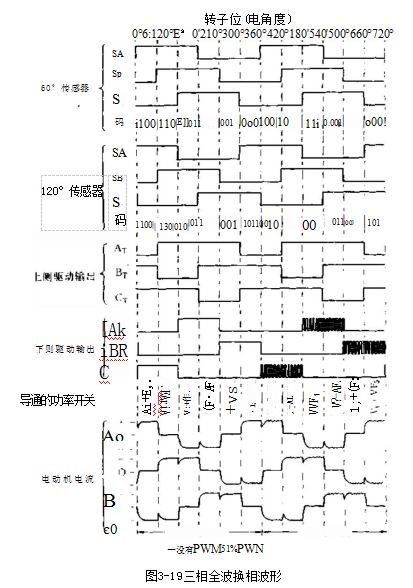
三相全波换相波形图(图3-19)给出输入的位置传感器信号、六个驱动输出、电动机相电流的时序图。图中第一个周期表示了无PWM的情况,而第二个周期是有50%PWM的情况。
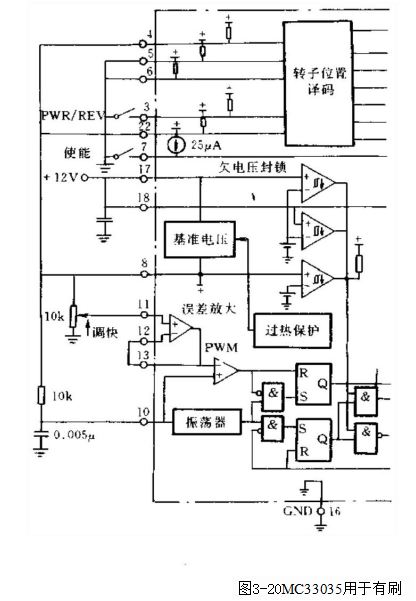
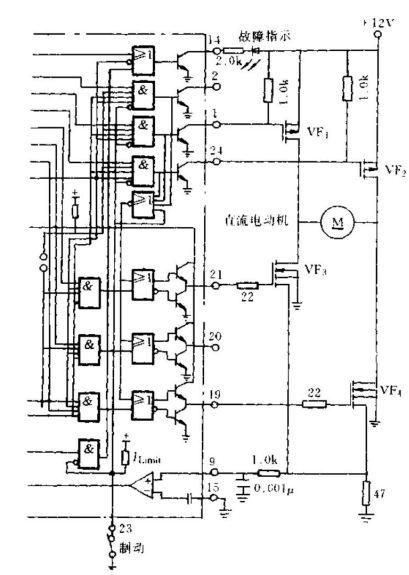
MC33035也可用来控制三相半波(3步)、两相和四相4步驱动的无刷直流电动机,还可以用来控制有刷直流电动机。如图3-20所示,利用MOTOROLA的MPM3002MOSFETH桥模块,以少量外围器件完成对一台1/10hp(约75W)有刷直流电动机的速度控制。MPM3002功率模块由两个P沟道和两个N沟道MOSFET组成,其极限数据是100V、8A。电路中4、5、6脚接为100输入码方式。脉宽调节频率为25kHz,最高限流为3A,可实现正反转控制和调速控制。
4.MC33039电子测速器MC33039是为无刷直流电动机闭环速度控制专门设计的集成电路,系统不必使用较高价格的电磁式或光电式测速机,就可实现精确调速控制。它直接利用三相无刷直流电动机转子位置传感器三个输出信号,经F/V变换成正比于电动机转速的电压。
从图3-21原理框图可知,1、2、3脚接收位置传感器三个信号,经有滞后的缓冲电路,以抑制输入噪声。经“或”运算得到
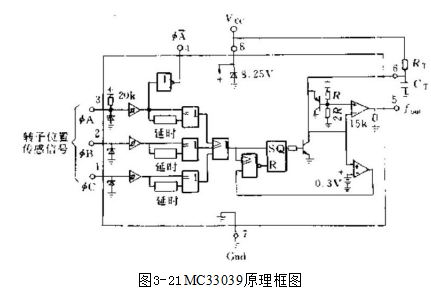
相当于电动机每对极下6个脉冲的信号。再经有外接定时元件CT和RT的单稳态电路,从5脚输出的fou信号的占空比与电动机转速有关,其直流分量与转速成正比。此信号在外接低通滤波器处理后,即可得到与转速成正比的测速电压。在图3-22波形图中,fou是5脚输出,Vcu(AVG)表示了它的平均值,即直流分量。
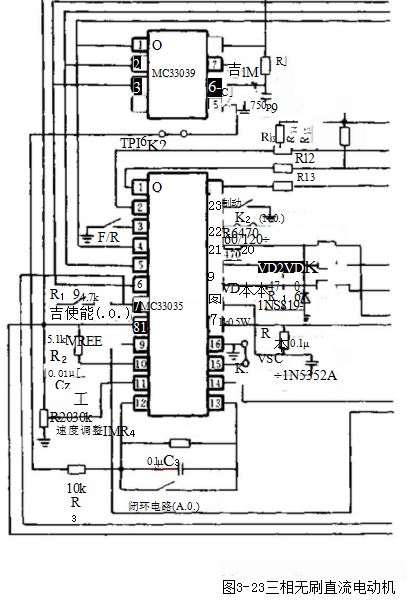
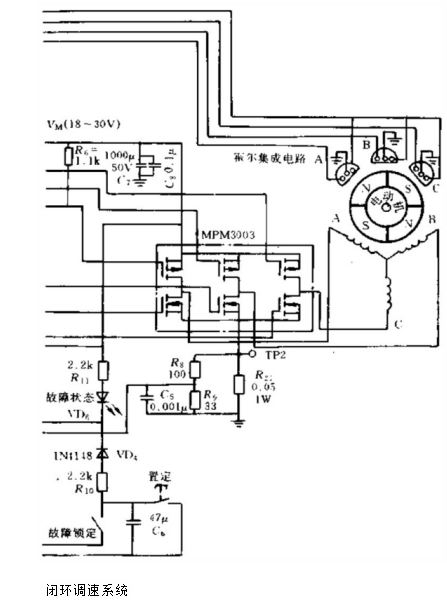
5.MC33039/MC33035/MPM3003组成的三相全波无刷直流电动机闭环速度控制系统MPM3003三相逆变桥功率模块是12脚塑料封装模块。上侧三个P沟道功率MOSFET的导通电阻为0.28Ω,下侧三个N沟道功率MOSFET的导通电阻为0.152,漏-源电压为60V,电流为10A。各功率管均带有反向续流二极管。
该闭环速度控制系统(图3-23)中,用三个霍尔集成电路作为转子位置传感器。用MC33035的8脚参考电压(6.24V)作为它们的电源。霍尔集成电路输出信号送至MC33039和MC33035。该例中电动机是四极的,从MC33039的5脚输出脉冲数是电动机每一转输出12个脉冲。按电动机最高转速来选择定时元件。设最
高转速为5000r/min,即83r/s。此时每秒输出脉冲数是83×12=996个。即其频率约为1000Hz,周期约为1ms。由MC33039说明书,取定时元件参数R₁=1MQ,C₁=750pF,单稳态电路产生脉冲宽度为950μs。8脚接MC33035的基准电压。5脚输出经电阻R₃接MC33035的12脚,即误差放大器反相输入端。放大器此时增益为10,电容C₃起滤波平滑作用。MC33035振荡器参数:R₂=5.1kΩ,C₂=0.01pF,PWM频率约为24kHz。
本系统采用无感电阻R₂(0.05Ω,1W)作为电流检测用,并经R₈、R,分压后再连接到9脚。C₅是小滤波电容。这样,系统限流为8A。
随便看看
- 2024-09-25三一挖掘机空调故障代码
- 2024-10-29液压系统动密封装置常见故障原因及对策
- 2024-09-18电流-电路基础知识
- 2024-09-20柴油机电子控制系统类型结构及工作原理
- 2024-09-19缸盖连接强度的计算-液压传动基础知识