
LS7263/LS7264高精度无刷直流电动机速度控制器
LS7263和LS7264都是LSICOMPUTERSYSTEMS,INC.生产的,适用于三相和四相无刷直流电动机高精度稳速控制专用集成电路。利用3.58MHz(LS7263)和2.4576MHz(LS7264)石英晶体振荡器,可获得3600r/min±0.1%的高精度速度。改变石英晶体振荡器频率可得到其他需要的速度。两集成电路的基本部分是相同的,下面以LS7263为主予以介绍。
1.主要特点
·高精度的速度调整率
·快速加速到预定速度且超调量小
·六输出端可直接驱动功率桥
·低速检出
·过电流检测
·制动控制
·电源接通自动复位
·使用10~28V电压
2.工作原理LS7263的其他控制功能和LS7261/LS7262相同。它的稳速是闭环控制。速度调节是以改变输出驱动的占空比实现的,不像LS7261/LS7262那样进行高频斩波控制。对于每一个换相间隔时间(即一个状态内),对应的电动机绕组导通工作时间仅是全部时间的一部分。“导通时间”由电路内掩模的PROM
查询表预先确定。在图3-14框图中,测速信号取自三个霍尔传感器输入S1、S2或S3中的任一个。此输入信号可被]、2或4分频,这由掩模时编制好。使获得的速度信息是每转的一倍、两倍(对于四极电动机),或一倍、两倍、四倍(对于八极电动机)。分频电路输出信号用来将累加器复位和将新数据存入寄存器。累加器在两个测速输入脉冲之间的时间内(或其倍数)计入时钟脉冲个数。此脉冲个数正比于这个时间,从而反比于电动机转速。由累
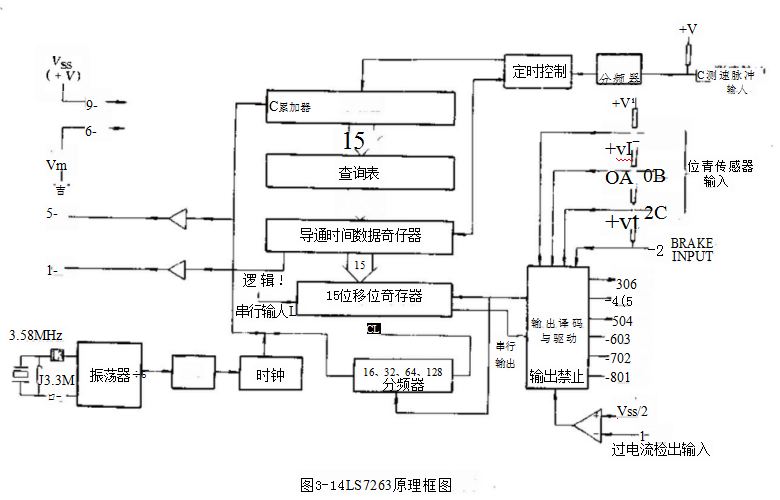
加器的15位二进制数在PROM查询表中寻址查得对应的“导通时间”,并存于寄存器内。如果电动机转速低于预定值,此寄存器全部位都是逻辑1。如果转速高于预定值,寄存器各位均为零。如果电动机转速到达或接近预定值,寄存器中一些位是1,另一些位是0。“导通时间”百分比(即占空比)与转速的精确关系也就是环路增益是由查询表中的ROM内容决定。LS7263有多种标准规格可供选用,也可为用户专门的电动机特制。例如,中增益的LS7263-01,占空比变化0~100%,对应转速变化为40r/min(3580~3620r/min),而高增益的LS7263-02,占空比变化0~100%,对应转速变化仅为6r/min(3597~3603r/min)。
寄存器数据在每个换相时刻送人15位串行移位寄存器中。后者的时钟信号从3.58MHz石英晶体振荡器经分频器来。它的分频系数在掩模时已确定,它和电动机极对数及需要的转速有关。在每个换相时刻,此移位寄存器数据送至解码驱动电路。解码器驱动输出端输出正确换相顺序和合适占空比信号,将电动机驱动至预期转速。
表3-4给出不同型号规格标准电路的一些数据和适用电动机的参数。
表3-4不同型号规格电路的主妻数据
、型号 | 电动机极数 | 传感器间距(°) | 增益 | 测速信号分频系数 | 振荡器分频系数 | 3600r/min 时的占空比(%) |
LS7263-01LS7263-02LS7263-03LS7263-07LS7264 | 4 8 4 8 4 | 60 120 120 120 90 | 中高中中中 | ]4241 | 384 192 384 192 384 | 35 65 35 65 65 |
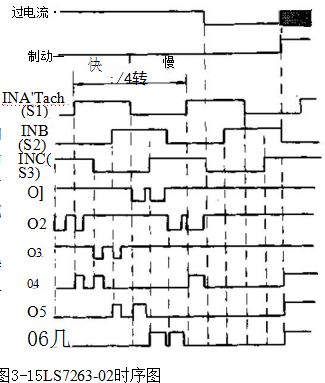
图3-15的LS7263-02 | 时序图表示一个八极电动机,在1/4 |
转时间内各输出端O1~06 | 的换相顺序及占空比变化情况。 |
3.引脚说明 |
引脚1(LSDE-TECTOUTPUT):低速检出端。当电动机转速低于1100r/min时,输出高电平。
引脚2(BRAKEINPUT):制动输入端。施加高电平时,输出端01、02、03截止,O4、05、06导通,使三相绕组短接在一起,实现制动。制动输入优先于其他输入。本引脚内设有上拉电阻。
引脚3~8(01~O6):输出端。输出端O1图3-15LS7263-02时序图
~03向外接PNP晶体管提供基极电流。输出端O4~06经外接限流电阻向NPN晶体管提供基极电流。限流电阻依工作电源电压和基极电流选择,为0.1~9.9kΩ。
引脚10~12(A、B、CINPUT):位置传感器输入端。接电动机转子位置传感器,要适应不同传感器间距或改变转向可在外电路以逻辑门处理后才输入本电路。
引脚13、14:振荡器端。两引脚外接石英晶体振荡器或其他振荡器电路,也可由13脚引入外时钟信号。
引脚15:频率试验端。供用户测量用,其频率是振荡器频率的1/6
引脚17:过电流检出输入端。从电源正极Vss串接小值电阻到PNP晶体管共射极端,引出一个约100kΩ电位器,另一端接地,滑动端连接至17脚。调节电位器,当电流刚稍大于限定值时输出端O1~06关闭。
引脚18;测速脉冲输入端。可将任一个位置传感器信号作为测速信号。测速输入端设有上拉电阻。
4.应用在图3-16中给出应用实例,它是用于温盘驱动器的三相无刷直流电动机,其运行转速是3600r/min。
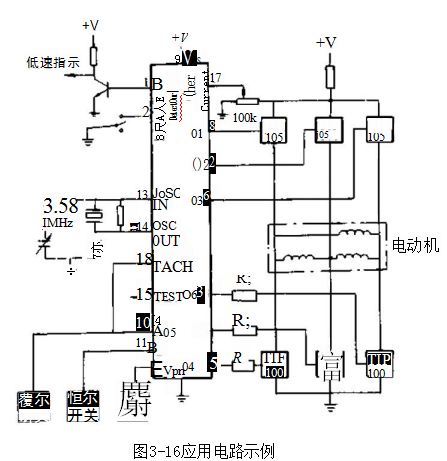
尽管本电路原设计的运行转速是3600r/min,但其他转速时也可以使用。例如,利用LS7263-02电路,改用2.68MHz晶体振荡器,对测速信号外加一级二分频电路,即可得到精确的5400r/min。如果将石英晶体振荡器电路用一个可变频率振荡器代替,LS7263也可使电动机工作于1500r/min或更低转速。
随便看看
- 2024-09-18驾驶室规格-挖掘机规格篇
- 2025-01-07多田野起重机各部分的名称
- 2024-09-27特雷克斯RH6 型挖掘机动臂沉降和整体无力故障的排除
- 2024-09-18起动机-工程机械电器系统
- 2024-12-17日本HR7A型加工中心的故障分析及排除