
LS7260/LS7261/LS7262无刷直流电动机控制器
LS7260/LS7261/LS7262是由LSI COMPUTER SYSTEMS 公司生产的三种性能相似、适用于三相和四相无刷直流电动机控 制的集成电路,外接功率开关器件后可用于较大电流和电压的电 动机的驱动和控制。
1 . 特点
·六个输出端可直接驱动P 沟道和N 沟道的MOSFET (LS7260), 或PNP 和NPN晶体管 (LS7261,LS7262)
·可适用于位置传感器空间间距为60°、120°、240°或300°情况
开环或闭环速度控制 · 模拟量速度控制输入 · 正反转控制
·输出使能控制 ·制动控制
· 过电流检测
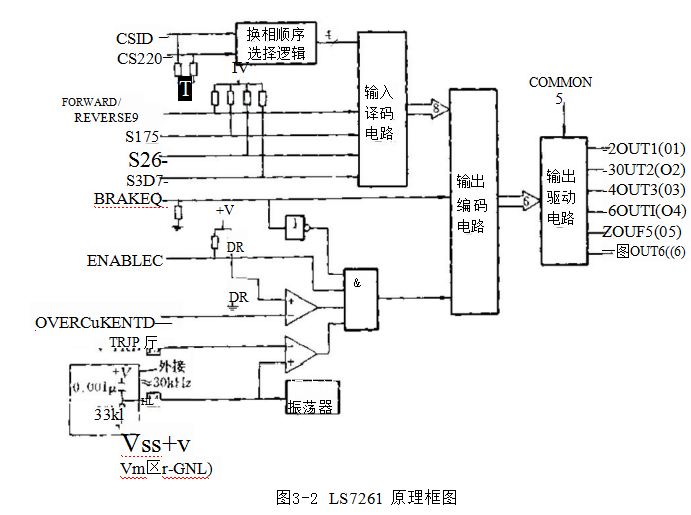
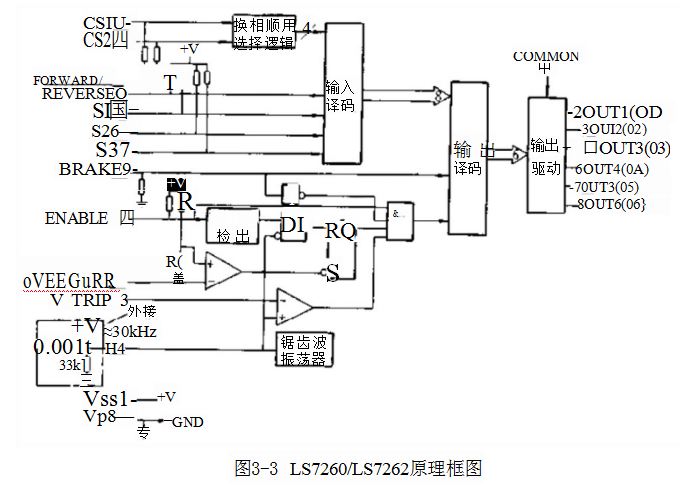
2.工作原理 LS7260/LS7261/LS7262 是离子注入的MOS 单片集成电路,其原理框图分别见图3-2和图3-3。它们的工作电 压范围为5~28V。内部包括位置传感器译码电路、锯齿波振荡器、 比较器电路和末级驱动电路,可实现对无刷电动机的起停、正反 转、开环和闭环速度控制、限流保护控制、制动控制等功能。
LS7260/LS7261/LS7262 的基本工作原理是相同的,它们的 区别是:
(1)过电流保护电路不同。LS7261 在出现过电流后,关闭输 出端,使电动机停转,属于过电流保护功能。而在LS7261/LS7262 电路中,过电流检测在振荡器每一个锯齿波周期内进行。 一旦电 动机电流超出预定值,RS 触发器翻转,暂时关闭输出端,电动机 电流下降至允许值之下,待下一个锯齿波的上升沿出现,使RS 触 发器复位,输出电路又恢复正常工作,使电动机电流回升,从而 实现电流的斩波控制,使电流得到限制。
(2)外接功率开关不同。LS7260 用于直接驱动MOSFET, LS7261/LS7262 适用于晶体管。
这些电路都采用标准20脚双列直插塑料封装。 3.引脚说明
引脚1、20(CS1 、CS2): 换相顺序选择端。根据电动机转子 位置传感器空间安排的不同,按表3-2选择CS1 和 CS2 的逻辑电 平,以得到正确的换相顺序。
1和20脚输入电路内部设有下拉电阻,故当引脚开路时,相 当于逻辑0。
引脚19(FORWARD/REVERSE): 方向端。由该引脚电平高低决定了电动机的两种转向。该引脚内部设有上拉电阻,故引 脚开路时,相当于逻辑1。
换相顺序的逻辑电平选择
|
位置传感器间距 |
CS1 |
CS2 |
|
60° |
0 |
0 |
|
120° |
0 |
1 |
|
240° |
1 |
0 |
|
300° |
1 |
1 |
引脚15、16、17(S1、S2、S3): 位置传感器输入端。三引脚 信号从电动机转子位置传感器来,内部已设有上拉电阻。如果用 霍尔传感器,它可以与该电路共用电源Vss。输出的换相顺序信号 O1 、O2 、O3 、O4 、05 、O6 与 S1 、S2 、S3 及 F/R 的关系见表3- 3。
引 脚 9(BRAKE): 制动端。对于LS7260, 令该引脚为高电 平时,O1 、02:03 和 O4 、05 、06 皆 为ON 态。对于LS7261 和 LS7262,则O1 、02 、O3为OFF 态,04、05、06为ON 态。此 时,外接上桥臂功率开关截止,下桥臂功率开关导通,使三相绕 组短接在一起,实现电动机的短接制动。9脚内设有下拉电阻,使 空脚时不会发生制动。
表3-3 换相顺序真值表
|
CS1 CS2 |
CS1 |
CS2 1 |
CS1 1 |
CS2 0 |
CS1 |
CS2 1 |
被使能的输出 |
||||
|
0 |
0 |
0 |
1 |
||||||||
|
S1 S2 |
S3 |
S1 S2 |
S3 |
S1 |
S2 |
S3 |
S1 S2 |
S3 |
F/R=1 |
F/R=0 |
|
|
0 0 |
0 |
0 0, |
1 |
0 |
1 |
0 |
0 1 |
1 |
01,05 |
02,04 |
|
|
1 0 |
0 |
1 0 |
1 |
1 |
0 |
1 1 |
L |
O3,05 |
02,Q6 |
||
|
1 1 |
0 |
1 0 |
0 |
1 |
0 |
0 |
1 1 |
0 |
O3,04 |
01,06 |
|
|
1 1 |
1 |
1 1 |
0 |
3 |
0 |
1 |
1 0 |
0 |
O2.04 |
O1,05 |
|
|
0 1 |
1 |
0 1 |
0 |
0 |
0 |
1 |
0 0 |
0 |
02,06 |
03,05 |
|
|
0 0 |
1 |
0 1 |
1 |
0 |
1 |
1 |
0 0 |
1 |
O1,06 |
03,04 |
|
|
0 I |
0 |
0 0 |
0 |
0 |
0 |
0 |
0 1 |
0 |
禁止 |
禁止 |
|
|
1 0 |
1 |
1 1 |
1 |
1 |
1 |
1 |
1 0 |
1 |
禁止 |
禁止 |
|
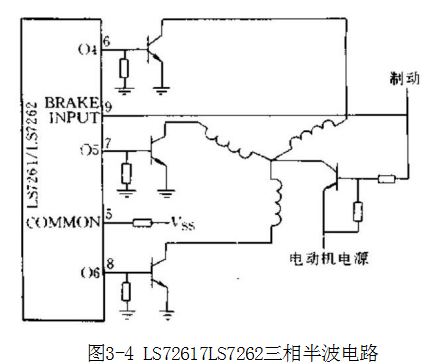
对于有中心抽头的三相无刷直流电动机,利用本电路时,只 使用了下桥臂三个功率开关,中心抽头应与电源Vss连接,构成三 相半波联结,需要有制动功能时,应按图3-4的接法,电动机中心 抽头经一个功率管接到Vss,此功率晶体管受控于BRAKE 信号, 当BRAKE 为1时,功率晶体管截止,下桥臂的功率管使电动机 三相绕组短接制动。
引脚10(ENABLE): 使能端。该引脚高电平时使电路正常工 作。施加低电平时,全部输出被禁止。本引脚内设有上拉电阻。此 外,本引脚输入信号的正跳沿可将LS7260/LS7262 的过电流RS 触发器复位。
引脚12 (OVERCURRENT SENSE):过电流检测端。用户 使用该引脚在过载情况下可保护电动机绕组、驱动电路和电源。在 驱动桥的接地端增串一个小电阻作为电流检测,检测信号连接到 一个100kQ的电位器上,电位器的另一端接电源正极。调节此电 位器,使电动机电流刚刚大于上限值时系统被禁止。理论上,过 电流检测电路的动作点是Vss/2, 其制造误差为±0.25V。对于制 作好的芯片,由于时间或温度变化,此动作电压的偏差为10mV
以 内 。LS7260 和 LS7262 在过电流时闭锁,在锯齿波振荡器正跳 沿或ENABLE 输入正跳沿时,使触发器复位,解除闭锁。也可利 用ENABLE 输入斩波信号,此时振荡器引脚应接Vss。
引脚13(V TRIP):控制端。该引脚与电路内的锯齿波振荡 器一起工作,对电动机进行PWM 控制。14脚锯齿波信号电平的 典型值是0.4Vss~(Vss-2V), 这里假定Vpo为地。当向13脚施 加的电压小于OSC 引脚电压时,可实现如表3-3所示的输出。若 此电压大于OSC 电压时,全部输出禁止。通常,利用此引脚作变 速调节。
引脚14 (SAWTOOTH OSCILLATOR):锯齿波振荡器端。 在该引脚外接定时电阻和电容,它们的值决定了锯齿波的振荡频 率。
引脚2、3、4(OUT1、2、3): 输出端。对于LS7261/LS7262 在COMMON(5 脚)浮地,这些漏极开路的输出被使能时,此三 输出可用来向外接PNP 晶体管提供基极驱动电流或向P 沟道 FET 提供栅极驱动。如果COMMON 维持Vss正电位,这些输出 可用来驱动NPN 晶体管或N 沟道FET 。而对于LS7260,COM- MON接 Vss, 这些输出用来驱动P 沟道FET。
引脚6、7、8 (OUT4,5,6): 输出端。这些漏极开路的输 出,可用以驱动外接NPN 晶体管或N 沟道FET。
引脚5 (COMMON): 公共端。 引脚11 (Vss) 电源正极端。
引脚18 (VDD):电源负极端(接地)。
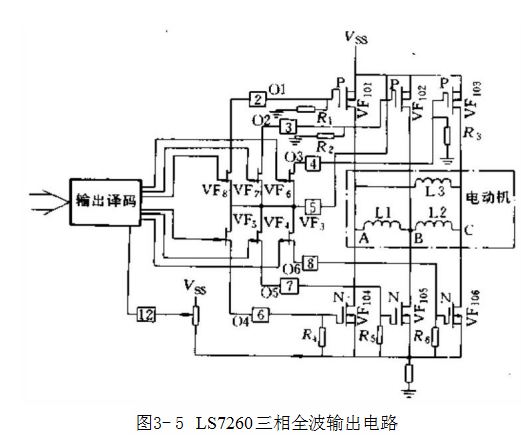
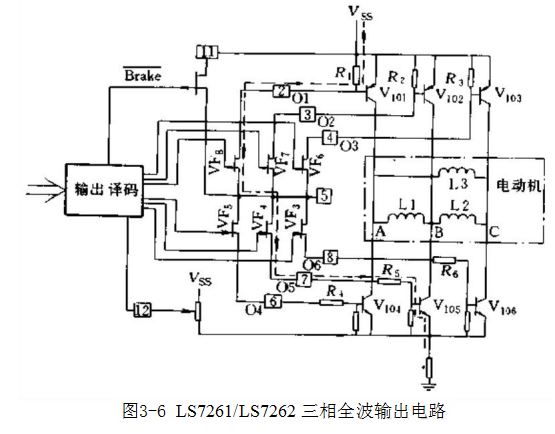
4 .应用 图3-5和图3-6表示了这种电路外接三相功率桥, 并有电流检测的连接方法。图中,VF₃~VF₈ 表示电路内部作输出 驱动的MOSFET 。图3-6表示了VF₈ 和 VF. 导通工作状态,电流 沿虚线流过外接晶体管V₁01和V¹05的基极。限流电阻Rs 应 由Vss 和需要的电流来选择。
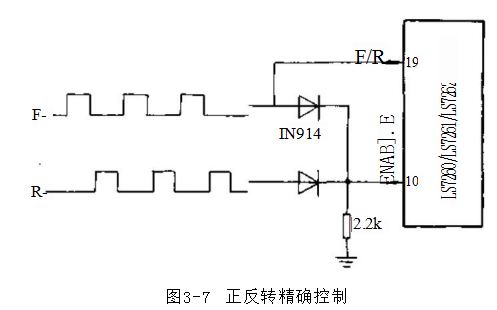
需要控制电动机在两个不同转向下加减速运行和调速时,可 利用SG1731或 UC1637等 PWM 电路,它们输出的FORWARD
(F)和REVERSE(R) 脉宽调制信号可如图3-7那样接至LS7260/ LS7261/LS7262。图中以电阻-二极管网络构成或门逻辑电路,F 或R 信号高电平时将LS7260/LS7261/LS7262 “使能”,并且F 为 高电平时电动机产生正向转矩,R 为高电平时产生反向转矩。电动 机的转子转向由F 和 R 的脉宽相对比例决定。而加速还是减速则 由这些脉宽的变化量决定。
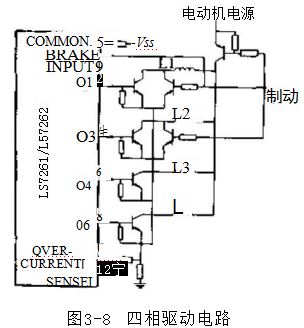
LS7261/LS7262 也可以 用于四相无刷直流电动机的 控制。此时,CS1和 CS2 均取 为0,两个正交的霍尔传感器 信号从S1 和 S2 脚输入,并 将S3 与S2 短接。图3-8表示 利用晶体管或FET 的四相 电动机驱动连接图,图中也 表示了电流检测及制动控 制 。
图3-9表示用于闭环速 度控制的接线图。利用电动
机转子位置传感器的一路信号(如S1端信号),经微分和对负脉
冲积分产生一个代表转速的直流电
压,加至运算放大器的反相输入端。接位置运算放大器的同相端是从电位器中 取得调节电压作为速度指令信号。放 大器的输出接V TRIP脚。由R₂-C 微分电路、R₃-VD₁ 负脉冲发生、R₄- C₂ 积分电路完成了频率/电压转换。 当电动机速度超过期望值时 ,V TRIP 增大,降低了PWM 的脉宽,使 电动机转速回落。相反,当转速低于 期望值时,V TRIP减小,脉宽增大,
使转速回升。为了正常工作,Rs 和 R₆ 应大于R,R₄ 应大于R₃ 和 R₂, 而且时间常数R₄C₂ 应大于R₂C₁ 。R₆ 上 并C₃ 的作用是使V TRIP 电压平滑。
5.较高电压的电动机驱动电路 LS7260/LS7261/LS7262 全部设计为工作电压7~28V, 前面所述应用电路中,电动机和集 成电路采用同一个电源电压。在许多情况下,电动机工作电压 VmT高于这个电压,此时需要采用电平转移电路。
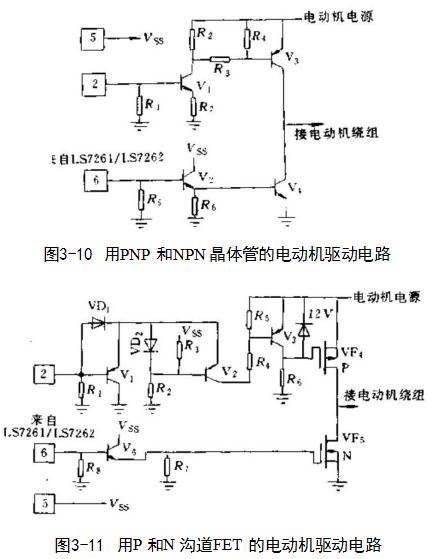
对于LS7261/LS7262, 将5脚连接到电源Vss正极,电路六个 输出FET 均变为源极输出。图3-10~图3-12表示不同的电平转 移电路,以适应不同的功率开关组合。图3-10适用于PNP 和 NPN 晶体管组合电路,这里只表示一个桥臂情况。它利用V₁ 作电 平转移,当2脚输出为高电平时,V, 导通,经R₃ 向 V₃ 管提供基 极驱动电流,使V₃ 导通。若2脚为低电平,V: 管截止,由Ra 作 用使V₃ 快速截止。V₂ 管为跟随器接法,由6脚控制V₄ 的导通或 截止。如果电动机使用更高电压,R₂ 和 R₃ 上的功耗将很大。此时, 在R₃ 上并加速电容,在V₃ 的 e 和 b 极并上保护二极管是必要的。 电阻功耗较大是此电路的缺点。图3-11改用P 沟道和N 沟道 FET, 此问题得以解决。但是,P 沟
道FET 的通态电阻比N 沟道 FET 的要大,较高的通态电阻使开关速度下降,损耗增加,效率
降低,可靠性减低。
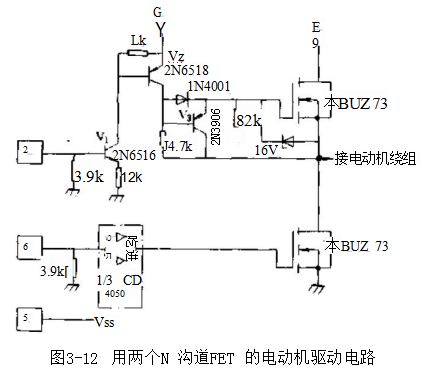
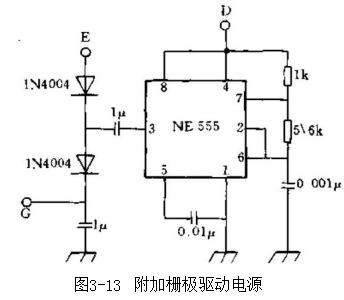
全部使用N 沟道FET 作功率开关有更高效率。图3-12是利 用BUZ73N 沟道功率FET 驱动工作电压为150V的三相无刷直 流电动机电路图。上桥臂N 沟道FET 需要提供其栅极驱动的外 加辅助电源。图3-13给出一个可应用的参考电路。由NE555 振荡 器产生方波经电容耦合到二极管网络,二极管1N4004 将12V 方 波整流出所需的直流电压,使G 点电压约为162V。D点接Vss,为 12V,E 点为150V。当 LS7261 或 LS7262 的2脚为高电平时,V:
和V₂ 导通,上桥臂的FET 的栅极被接至162V 而导通,其源极电
压接近150V。其栅源极接一个16V 稳压二极管来保护。当2脚为 低电平时,V₁ 和 V₂ 截止,此FET 的栅源极间电容电荷经V₃ 快 速放电。下桥臂的BUZ73从6脚经两个并接的CD4050反相器作 缓冲而进行驱动。
随便看看
- 2024-12-13液压系统欠速
- 2024-10-25WLYl00型液压挖掘机的液压系统常见噪声故障
- 2024-09-20小松6系列7系列挖掘机故障代码解析
- 2024-10-22工程机械液压系统故障的几种常用诊断方法
- 2025-01-15P.T.O操作和暖机运转GT55OE