
无刷直流电动机控制专用集成电路
有刷直流电动机以它具有线性机械特性、宽调速范围、大起动转矩、较高效率、简单的控制电路等优点,在运动控制系统中得到广泛的应用。但它的电刷和换向器带来了可靠性较低、需经常维护等弱点。近20多年来,由于大功率开关器件、模拟和数字集成电路、高性能磁性材料的进步,采用电子换向原理工作的无刷直流电动机得到长足进展。它从最初的宇航、军事设施应用领域扩展到工业和民用领域,应用日益广泛。目前,小功率无刷直流电动机主要用于计算机外围设备、办公室自动化设备和音响影视设备中,如软盘、硬盘、光盘的驱动,激光打印机棱镜驱动,复印机、传真机、轻印刷机械、录像机、CD机、VCD机、摄像机、数控绘图机、小型冷却风机等的驱动。近年,在汽车电子方面出现了应用势头,在家用电器中的风扇、洗衣机、空调器、电冰箱的应用也出现苗头。在工业控制领域,如数控机床的进给伺服控制和主轴驱动,机器人关节驱动和自动生产线、电子产品加工装备上使用各种中小功率的无刷直流电动机。
无刷直流电动机迅速推广应用的重要因素之一是,近10多年来功率集成电路的技术进步。特别是无刷直流电动机专用的控制和驱动集成电路出现,它缓解了良好控制性能和昂贵成本的矛盾。各国著名半导体厂商推出多种不同规格和用途的无刷直流电动机专用集成电路,见表3-1。这些功能齐全、性能优异、价格低廉的专用集成电路,为无刷直流电动机大量推广应用创造了决定性的条件。表中带*号的产品型号在本章中有较详细介绍。
1.基本电子换向电路在图3-1中,给出无刷直流电动机控
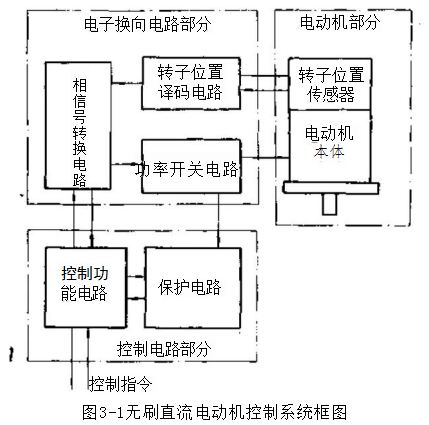
制系统原理框图。其中电动机本体、转子位置传感器和电子换向
电路是最基本的组成部分。电动机本体类似于永磁交流同步电动
机,它有永磁的转子和多相定子绕组。尽管其相数可在单相到12
相中选择,但专用集成电路大多数是为三相电动机设计的,少数
是两相、四相的。单相的只是用于无刷直流电动机,例如第9章
9.7节所述的UDN3625M/UDN3626M单相无刷直流电动机霍
尔传感器和驱动器集成电路。无刷直流电动机常需要设置检测转
子位置的传感器。传感器信号在转子位置译码器中转换成正确的
换相顺序信号,控制功率开关器件,按一定顺序接通或关断相绕
组。此传感器的作用是确保定子绕组产生的施转磁场和转子磁场
之间保持规定的超前关系,产生转矩。若电动机绕组是两相或三
相(全波)的,则功率开关是双H桥电路或三相逆变桥电路。对
于四相或三相半波接法的绕组、功率开关是四个或三个单侧的开
关(通常为下侧功率开关)。在专用集成电路中,功率开关采用功
率达林顿晶体管或MOSFET的较多。
无刷直流电动机专用集成电路内均含有一个转子位置译码器电路,接收转子位置传感器信号,给予放大和译码,有时还需要向转子位置传感器送出激励电流。尽管霍尔元件、光耦合元件、磁阻元件或高频电磁感应元件等都可以用作转子位置传感器,但在专用集成电路中绝大多数是为霍尔开关集成电路转子位置传感器设计的。芯片内部稳压电源向霍尔集成电路提供一定的激励电流。接收集电极开路开关型霍尔集成电路的输入电路常包括上拉负载电阻、施密特电路。输入通道设置两个或三个,分别对应于两相(四相)或三相的电动机。这些信号送入逻辑译码电路,产生换相顺序信号,用来驱动H桥或逆变桥的上侧和下侧功率开关。在功率级还需要设置基极(栅极)驱动电路和它们需要的直流电源。在小功率驱动电路中,充电泵电路是常用的,它用来产生上侧功率开关使用N沟道MOSFET时所需要的栅极驱动直流辅助电源,见图3-13或图3-40。
2.控制功能专用集成电路芯片上设置了许多控制功能。
大多数专用芯片的功率控制是采用PWM方式。电路内设置有频率可设定的锯齿波振荡器、误差放大器、PWM比较器和温度补偿基准电压源等。对于桥式全波驱动电路,常只对下桥臂开关进行脉宽调制。改变脉冲占空比相当于改变施加于定子绕组的平均电压,从南控制了电动机的转矩和转速。在UC3625集成电路中,可选择PWM信号对逆变桥的不同控制方式,使电动机作两象限或四象限运行,参见3.6节。
少数低功率的专用芯片中,末级功率晶体管工作于线性放大区,线性放大器工作方式的功耗比PWM开关工作方式的功耗高得多,但噪声会明显减小。3.11节所述的TDA5140外串接一个功率晶体管,用来调节供给主开关电路的电源电压,实现速度调节。它的无转子位置传感器工作原理决定了它不适宜采用PWM对逆变器直接进行调节。
无刷直流电动机闭环速度控制和有刷直流电动机的相似,可
以采用模拟量控制方式或数字锁相环工作方式。例如MC33035(见3.4节)控制器,利用转子位置传感器信号综合出与速度频率成正比的脉冲信号,经MC33039电子测速器进行F/V变换,得到速度电压信号。在误差放大器中,反馈速度信号和设定速度信号比较,其误差送到PWM发生器中,实现闭环速度调节。3.10节的A8902内部设有锁相环电路,具有频率锁定速度控制功能。在第4章给出了若干锁相环速度控制的例子。3.3节的LS7263和LS7264是高精度无刷直流电动机数字速度控制器集成电路,它的内部设有一个15位的移位寄存器,对指令速度频率信号和反馈速度频率信号进行数字比较,通过闭环控制维持电动机转速的稳定。
此外,专用集成电路还具有正反转控制、起停控制、制动控制等功能。它们都是由特定引脚的逻辑电平来设定或控制的。
3.内设保护功能电路专用集成电路中都设有一些保护电路,对芯片和电动机进行保护。常见的包括输出限流、过电流延时关断、控制电压欠电压关断、结温过热报警和关断、向微处理器主控制系统发出故障输出信号。对于H桥和逆变桥功率开关,电路设计上都有交叉保护功能,防止换相时上下桥臂出现直通。
大多数无刷直流电动机专用芯片都需要限制输出电流,防止起动或突然反转时过大电流引起功率开关损坏和电动机永磁体的去磁。电动机负载电流持续过大也是不允许的。常采用“逐周限流”技术来防止出现过电流。常见的方法是用与功率开关串接的检测电阻作为电流检测元件,在PWM一个周期内,当电流上升到某一设定阈值,过电流比较器翻转,关断输出功率开关,等待下一个PWM脉冲的到来,才重新打开功率开关。通过开/关控制使输出电流限制在一个安全值内。要注意的是,这种方法对制动时出现的大电流也许没有限制作用、要对电路做具体分析。
控制电路电压不足时,可能使控制逻辑部分工作不正常,或使功率开关基极(栅极)驱动电流不足,造成过热或失效。因此欠电压保护是必需的。
将电动机正常起动电流和不正常过载电流加以区分是必要
的,设置带时延的过电流保护,使得在驱动较大惯性负载时也能正常起动电动机,不会产生误保护动作。在规定时延时间内,允许有较大起动电流输出,得到较大的起动转矩。若过电流时间过长而超过设定的时延,闭锁功率输出,同时发出故障输出信号。需要复位信号才能恢复正常状态。面UDN2936则由计算机控制两种限流阈值,来解决这个问题。
故障输出端向主计算机发出故障诊断信息,同时关断功率开关。故障诊断,除上述的过电流、欠电压、过热之外,可能还包括传感器输入无信号或逻辑组合异常、测速信号输入异常等。
4.无转子位置传感器的专用控制集成电路当永磁无刷直流电动机运转时,各相绕组的反电动势(EMF)与转子位置密切相关的。由于各相绕组是交替导通工作的,在某相绕组不导通的时刻,其反电动势波形在该绕组端头有可能检测出来,利用这些反电动势波形的某些特殊点,可代替转子位置传感器的功能,得到需要的换相信息。基于这一原理,开发了许多无转子位置传感器的无刷直流电动机专用集成电路。例如使用于光盘驱动(CD、
CD-ROM、MD等),在一些硬盘驱动器中也得到应用。如本章介绍的A8902、TDA5140系列,ML4411等电路就是这方面的例子,它们利用集成电路的优势,以增加电路和控制复杂性来换取电动机结构的简化。无转子位置传感器控制技术在无刷直流电动机控制专用集成电路中的应用日益增多。多家厂商将此技术应用于其IC产品中,如Allegro、Philips、MicroLinear、日立、NEC、三洋等公司,都有此种集成电路产品供选用。
5.大功率无刷直流电动机的驱动带有功率驱动级的无刷直流电动机专用集成电路,属于小功率范围,驱动能力有限。对于较大功率电动机,必须使用外接功率级的控制器集成电路。例如,3.2节介绍的LS7260/LS7261/LS7262无刷直流电动机控制器,其末级六个输出可直接用来驱动由功率晶体管(或功率MOS-FET)组成的三相逆变桥。图3-12、图3-13分别给出驱动分立的功率MOSFET和产生栅极驱动电源的例子。
单片集成的三相逆变桥电路已经出现,例如在图3-23的电路中,使用MPM3003(60V,10A)三相逆变功率桥集成电路,它是由MC33035专用控制器直接驱动的。另一个例子是,东芝公司MP6901单片三相晶体管功率模块(80V,4A),见第4章4.5节和图4-22。已有更大功率的GTR、IGBT三相六单元逆变桥模块产品可供选用。
日本东芝公司500V、1A的,日立公司550V、1A的单片智能三相逆变桥集成电路,三菱公司的智能三相功率模块(最高达1200V,300A)有更先进、完整的功能,见第11章11.5节。它们都是适用于大功率无刷直流电动机末级驱动的新型功率器件。
裹3-1无刷直流电动机控制专用集成电路一览表
型号 | 厂商 | 电压/V | 电流 /A | 特点 | 封装 |
#MC33033 | 30 |
三相控制器、霍尔,全波,PWM,正反转,制动,二、四相可用 | DIP20 | ||
*MC33034 | 30 | DIP24 | |||
*MC33035 |
| 30 | DIP24 | ||
*MC33039 | 5 | 电子测速器、F/V | DIP8 | ||
★LM621 | NS | 45 | 3/4相控制器,全波,半波 | DIP18 | |
*LS7260 |
LS1 Computer | 28 |
3/4相控制器,PWM,正反转,制动,限流 | D]P20 | |
*LS7261 | ·28 | DIP20 | |||
*LS7262 | 28 | DIP20 | |||
LS7263 | 28 |
3/4相,速度控制器 | DLP18 | ||
LS7264 | 28 | DIP20 | |||
LS7362 | 28 | 3/4相控制器 | DIP20 | ||
*TDA5140 |
Philips | 12 | 0.6 | 三相全波,EMF传惑,测速输出,驱动器 | DIP18 |
TDA5141 | 12 | 1.5 | DIP18 | ||
*TDA5142 | 24.5 | 三相全波控制器,EMF传感,河速输出 | SO24 | ||
TDA5143 | 18 | 1 |
三相全波驱动器、EMF传感,测速输出 | S020 | |
TDA5144 | 14.5 | 1.8 | SO20 | ||
TDA5145 | 14.5 | 2.0 | DIP28 |
型 号 | 厂 商 | 电压 /V | 电流 /A | 特 点 | 封 装 |
*ML441〕 |
Miero Linear | 12 |
三相全波控制器,EMF传感,测速 频率信号 | SO28 | |
ML4412 | 12 | SO28 | |||
ML4420 | 12 | S028 | |||
ML6035 | 5 | 1 | 三相全波驱动 | QFP32 | |
ML4510 | 5 | 三相全波控制器,EMF传感 | SO28 | ||
*UC3620 |
UNITRODE | 40 | 2 | 三相,开关型驱动器 | DIL24 |
UC3622 | 40 | 2 | 兰相,开关型驱动器、PWM | ZIP15 | |
*UC3623 | 40 | 1 | 三相,低噪声开关型驱动器 | ZIP15 | |
+UC3625 | 20 | 三相,开关型控制器,软起动,测速 | DL28 | ||
UC3655 | 40 | 3 | 三相,低饱和电压线性驱动器 | ZIP15 | |
L6230 L6231 L6232 L6235 L6236 |
SGS | 18 18 12 18 20 | 3 3 2.5 0.4 0.4 | 三相全波、线性电流驱动,双向 三相全波、线性电流驱动 主导轴驱动 R - D A T 巫 动 R-DAT驱动、双向 | ZIP15 ZIP15 LDCC44 LDCC20 LDCC20 |
A8901 *A8902 A8925 A8980 UDN2936 |
Allegro | 7 14 14 7 45 | 0.9 0.9 4 4 2 | 三相全波,EMF传感,可编程电流 控制 三相全波,EMF传感、锁相速度控 制 三相全波驱动,电流控制 硬盘驱动器主轴和音闺电动机控制 双向.三相全波,PWM电流控制, 制动 | DIP24 DIP24 PLCC44 PLCC64 SIP12 |
UDN3625 | 12 | 0.9 | 单相无刷电机驱动,内含霍尔传感 器,测速输出 | DIP8 | |
UDN3626 | 24 | 0.4 | DIP8 | ||
*AN8290NS | 松下 | 20 | 0.3 | CD机主轴驱动器 | DIP24 |
TA7712 |
东芝 | 8 | 三相全波控制器,双向,F/V,制动 | DIL20 | |
TA7745 TA8402F | 18 18 | 2 1 | 三相半波,可外接上侧晶体管变为 全波驱动 | DIL16 20 |
型 号 | 厂 商 | 电压 /V | 电流 /A | 特 点 | 封 装 |
TA7245 TA7247 TA7248 TA7259 TA7260 TA7261 TA7262 |
东芝 |
38 38 26
25 |
1.5 1.5 1.2
1.5 | 三相 |
DL20 DIL20 DIL,14
DIL14 |
三相全波驱动,双向,PWM,过电 流、过热保护 | |||||
三相全波,双向,用于VTR、FDD、 HDD主轴驱动 两相全波 两相全波 三相全波,双向 | |||||
HA13403 HA13406 HA13412 HA13426 HA13431 HA13432 HA13439 HA13440 HA13441 HA13442 HA13455 HA13457 HA13481 HA13484 HA13501S HA13601 HIP40111S |
日立 | 5 5 12 12 20 20 28 5 15 12 18 16 12 24 5 5 12 | 1.5 3.0 1.0 3.0 1.0 0.5 1.5 1.0 2.0 4.0 1.0 1.0 2.0
].2 2.0 3.0 | 三相,低饱和压降 三相 兰相 三相,HDD主轴驱动 5.25in FDD主轴驱动 三相。有鉴频电路 两相 FDD主轴驱动 | ZIP23 ZIP23 ZIP23 ZIP23 ZIP23 DIP28
QFP28 ZIP23 ZIP23 DIP24 DIP24 DIP26 DIP30 DIP26 DIP26 SIP16 |
三相,风机 | |||||
三相 三相,VTR主导轴驱动 三相,反电动势检测换向 三相、PWM,数字速度控制 三相,鉴频电路 三相,鉴频电路 三相,过电流、过热保护 | |||||
M51712 M56635 |
三菱 | 12 12 | 1.2 |
三相,FDD主轴驱动 | DIP28 SSOP36 |
型 号 | 厂 商 | 电压 /V | 电流 /A | 特 点 | 封 装 |
M56638 M56733 M56743 |
三菱 | 5 12 5 |
三相,FDD主轴驱动 | SSOP36 SSOP36 SSOP36 | |
LB1670M LB1673 LB1813M LB1810M LB1684 LB1687
LB1662 LB1693 LB1620 |
三洋 | 12 3.5 5 12 20 16 5 36 26 | 1.5 1.0 1.0 1.0 1.5 1.5 1.5 2.5 1.5 | i 三相,无位置传感器 | SO30 SO24 SO36 QFP44 DLP20 DIP30
DIP20 |
数字速度控制,3.5in FDD | |||||
三相、VCR主导轴驱动 三相,VCR主导/磁鼓驱动,FG放 大 风机,过热保护 三相风机 三相、全波,霍尔传感器,限流 |
注 :lip=25.4mm。
随便看看
- 2024-09-20神钢SK200-2 SK200-3挖掘机维修故障代码
- 2024-09-19缓冲装置-液压传动基础知识
- 2024-09-19顺序阀-液压传动基础知识
- 2024-10-16供循环计算用的传热速率
- 2024-09-19阀的基本结构-液压传动基础知识