
UC3637在步进电动机微步距控制中的应用
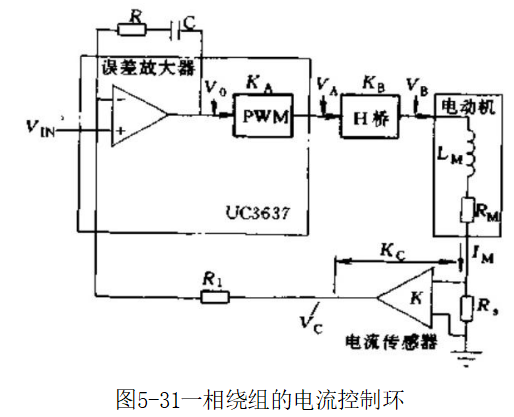
UC3637双PWM控制器也可以用于步进电动机微步距控制。这里介绍UC3637用于两相混合式步进电动机正余弦细分微步距控制的例子,其相电流为±6A,电路图见图5-31。
1.环路分析两相混合式步进电动机细分微步距控制,要求两相电流呈正弦和余弦变化。对任一相电路,其主要问题是实现电流的闭环控制。如图5-31所示,输入电流指令VW是正弦电压信号,例如其峰值为士6V代表绕组电流峰值为士6A。UC3637在此环路中起高增益放大器和PWM放大器的作用。其输出送H桥功率电路。电机绕组电流IM经低阻值电阻R₅检测,放大后,以Vc电压表示电流的大小。由于电动机反电动势对电流闭环控制影响较小,予以忽略。
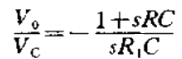
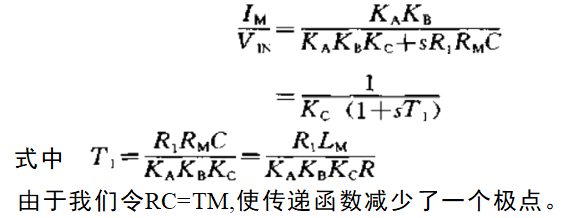
图中,误差放大器的传递函数:
电动机传递函数:
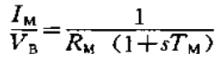
式中TM——电动机的电时间常数,TM=LM/RM这里设R₃<RM。前进通道传递函数是

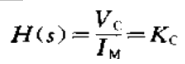
反馈通道传递函数:
则,闭环传递函数是

如果我们令RC=TM,得
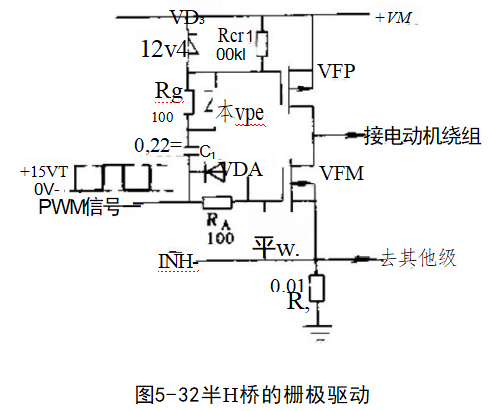
2.电路设计首先考虑末级H桥电路,在半桥电路(见图5-32)中,表示了这里采用P沟道和N沟道功率MOSFET。其特点是上管的栅极驱动通过电容C₁实现。这是由于步进电动机驱动信号总是交变的。在堵转或低速时,它是斩波信号,在高速时,则是有步进脉冲信号或加上斩波信号经电容传输给栅极,不会出现连续直流信号的情况。为了维持栅极驱动,时间常数C₁RB要取得是够大。二极管CR。和CRe是使功率管能快速截止。齐纳二极管CR:供VFP管栅极电压钳位用。禁止线INH是为防止在电机电源VM上升过程中,由于C₁必须充电而引起VFP和VFM同时导通而设置的。在VM建立过程中,INH为低电平,维持VFM截止。
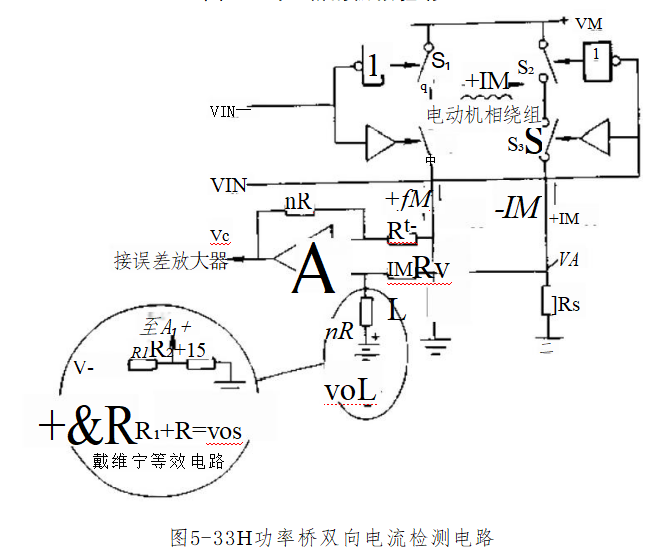
从H桥示意电路(见图5-33)输入信号V'iN为低电平时,开关S₁和S₄导通,绕组电流IM为正向,流过电流检测电阻Rs;当V'IN为高电平时,S₂和S₃导通,IM为反向而流过Rss。电流反馈信号由运算放大器A₁产生。取Rs=Rss=Rs₄,放大器A₁输出电压
Vc=Vos十nIMRs
Vos是IM=0时的输出,在A,电源Vcc=15V时,取Vos=Vα:/2=7.5V,n=5,Rs=0.10,得
Vc=7.5+0.51M
当电流IM从+6A到-6A变化时,Vc电压变化是+10.5~十4.5V。
参见图5-34,利用UC3637产生H桥驱动信号V'TN和V'IN(7脚和4脚)。它采用单电源Vcc=+15V。用三个20kΩ电阻分压,使V₁=10V(1脚),V₃=5V(3脚),三角波在5~10V内变化(2脚输出)。内部比较器A的反相输入端为10脚、比较器B的同相输入端8脚与2脚连接。比较器A和B的另一个输入端(11脚和9脚)接17脚(误差放大器输出)。当此点施加电压在+5~10V内变化时,4脚和7脚输出PWM的占空比被控制。但内部误差放大器输出(17脚)有可能超过这个电压范围,会使PWM占空比达到0%或100%。如前面指出,这是以电容耦合作P沟道MOS
FET栅极驱动必须避免的。因此9、11脚的输出用三个20kΩ电阻分别连接至地、+15V和17脚,使17脚输出信号衰减。
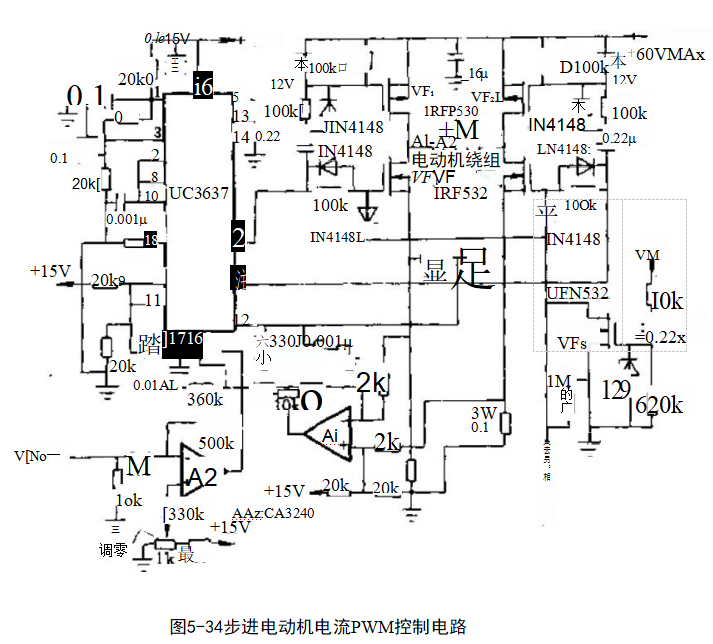
利用UC3637内部限流比较器(12和13脚输入),对绕组及功率管作限流保护。此比较器偏置门限电压为200mV。电路按最高电流10A设计,H桥电流检测电阻上的电压,此时将是1V,经两个1kΩ和3302分压后得到接近于200mV的过电流信号,从12脚输入,实现了限流保护。
UC3637内部误差放大器输入端16脚接电流反馈信号,时间常数RC=3.6ms,和被控电动机绕组时间常数一样。放大器A2组成电平移动电路,允许输入控制电压VN在±6V范围内变化,而所有运算放大器只需单电源供电。
图中右下角VF₅组成的电路是电动机电源VM建立过程中产生INH信号的保护电路。
该电路利用两片UC3637对两相步进电动机绕组电流闭环PWM控制,如图所示VM电压为20~60V。另外,增加正余弦信号发生电路可组成一个简单、低成本的微步距控制电路。该电路输出电流与输入电压的跨导有优于1%的精度。改变电容Cr值,该电路工作频率可达100kHz。
随便看看
- 2025-01-08半导体的共价键结构
- 2024-09-29液压系统滤油器
- 2025-01-08BJT的结构三极管
- 2024-09-19阀的基本要求-液压传动基础知识
- 2024-09-20日立故障代码0004-11:4缸喷油器故障