
TA7289步进电动机微步距驱动器
由日本东芝公司生产的TA7289步进电动机驱动集成电路,采用PWM电流斩波控制,可用来控制一相绕组电流的幅值和方向。利用两片TA7289集成电路可用于两相混合式步进电动机的微步距驱动,应用于硬盘、打印机、传真机、复印机等设备的控制和驱动。
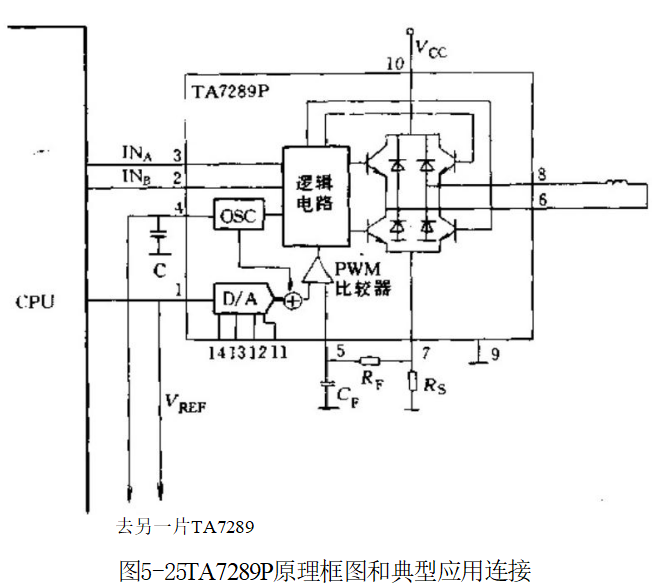
本集成电路采用两种封装方式:P型是14脚双列直插式塑料封装;F型是20脚双列扁平封装。图5-25表示了TA7289P的内部原理框图和典型应用的连接。
本电路最高电源电压为30V,输出相电流峰值为1.5A,连续电流为0.7A。信号输入端是TTL电平兼容。
从原理框图可见,它内部主要组成部分是:振荡器(OSC)、4bit的D/A转换器、PWM比较器、逻辑门电路、H桥功率开关。
它是一个双极性驱动电路,绕组电流的大小和极性取决于从1脚输入的基准电压VREF和从11~14脚输入的4bit数据。流经绕组的电流流过7脚外接的电流检测电阻Rs.产生压降经RF、CF低通滤波器滤去噪声后,从5脚输入到PWM比较器的反相输入端。从D/A转换器来的电流指令信号送入比较器的同相输入端,同时输入的还有从振荡器来的锯齿波信号。从比较器获得PWM信号用来调制H桥的输出,使绕组电流跟随电流指令的变化而变化,实现了电流的斩波控制。
利用4bitD/A转换能力,可将绕组电流分为16等份。但对两相步进电动机微步距驱动,通常采用两相电流按正弦和余弦规律变化的方案。这样,利用固定的VREF电压,双输入INA和INs控制,可以设计出每周期16细分的运行方式,见表11-10。
TA7289在硬盘驱动器中应用则采用另一方案。将该芯片的D/A转换器闲置,11~14脚均接+5V,利用主计算机输出两相电流的并行数据,送给两个8bit的外接D/A转换器,使相电流分辨率提高到25bit。
两片同时使用时,要把它们的4脚连接在一起,在一片的4脚上接电容器即可,使两芯片的斩波频率同步。外接电容C(μF)决定了振荡器的频率f(kHz)。

如图中C=0.037μF,可计算得f=1.26kHz。
5.9IXMS150高性能双PWM步进电动机微步距控制器
美国IXYS公司生产的IXMS150是一种高性能CMOS单片集成电路,它有两路PWM输出,可用来驱动外接的两路独立的H桥电路,并进行精确的电流闭环控制,因此,它特别适合于两相步进电动机的微步距控制。利用其高精度电流控制,步进电动机细分控制可做到每步细分超过250个微步。对于常见的200步
/r两相混合式步进电动机,可实现5000微步/。这样不但大大改善了步进电动机系统的运动分辨率,而且明显减少了低速速度纹波和谐振现象。它也可以用来控制两台直流电动机,用于机器人、打印机、绘图机、X-Y平台等两坐标的位置伺服控制。利用IXMS150集成电路,不但减少了外围元件、印制电路板面积和设计时间,从而降低整个系统的成本,同时也提高了系统的可靠性。
1.特点
·双通道同步的PWM输出
·宽调制频率范围20~400kHz
·输入电流指令的电压范围士2.0V(满刻度)
·反馈电流信号的电压范围±0.625V(满刻度)·两通道增益偏差1%(可由外电路调整)
·增益线性度1.6%
·用前馈补偿电动机电源的变化
·每个H桥只需一个电流检测电阻·两级电流限制
·有欠电压保护
·对交流耦合基极(栅极)驱动的占空比限制·宽范围的死区时间设定
·有负电压电源产生
·可由单极性电源供电
2.引脚功能说明IXMS150是24脚DIP封装。引脚功能说明见表5-14。表的引脚号列中有括号的表示B相通道的引脚号,相应的无括号的引脚号是A相通道的。
表5-14IXMS150引脚功能说明
引脚号 | 符号 | 功能说明 |
24 | VDD | 正电源 |
1 | AGND | 模拟地 |
12 | DGND | 数字地 |
3,(22) | VIN | 模拟输入指令,输入阻抗大于20kΩ |
引脚号 | 符号 | 功能说明 |
9.10(15,16) | VouT | 输出端,经缓冲级后可驱动MOSFET的H功率桥 |
6(19) | SENSE | 接电流检测电阻 |
2,4.5 (20,21,23) | COMP | 补偿端 |
17.18 | Ro,Ce | 设定振荡器频率和死区时间 |
14 | OUTDIS | 可用作使能输入端:强制为低电平时、使VoCT输出 |
为低电平;也可用作状态输出:低电平表示有过电流或+Voo.-VBB电压不正常 | ||
11 | VBB | 内部负偏压发生器的输出端 |
13 | CpUMP | 接充电泵电容 |
8 | BYPASS | 接滤波电容 |
7 | FFWD | 前馈补偿端 |
3.基本组成部分和工作原理从图5-26可见,本集成电路由五个主要部分组成:
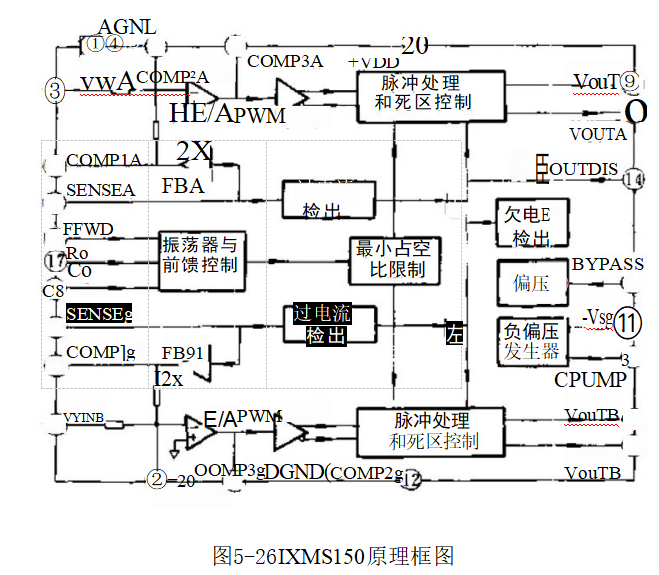
·振荡器和前馈补偿电路
·控制电动机电流的模拟电路
·对H桥或电动机的非正常情况保护电路
·PWM电路
·产生负偏压电路
现分别说明如下
(1)振荡器:内部振荡器的振荡频率f。由外接R。和C。整定。此两参数决定了振荡器开关频率、死区大小以及9、10、15、16脚输出信号的最小脉冲宽度。推荐R。使用范围为15~100kΩ,Co的范围为100~2000pF。
振荡器频率可依下式计算:
死区时间:
tDT=RpT(C。+Cp)
最小脉冲宽度:
tpw=Rπp(C₀+Cp)
式中Cp-——寄生电容,Cp≈38pF;
RDT-—内部电阻.Rpr≈1.4kΩ;Rmp——内部电阻,Rmp≈3.6kΩ。
(2)前馈补偿:对于固定频率的PWM控制系统,其开环增益、电机电流变化速度、电流纹波都和供电电源电压成正比。由于增益随电源电压而变化,使这种系统难以设计。若考虑最坏情况设计、则限制了带宽。为此,本集成电路内采用了前馈技术进行补偿,使开环增益与FFWD(7脚)电压信号成反比关系。此电压从电源电压经分压取得,从而系统的开环增益就和电源电压无关,使系
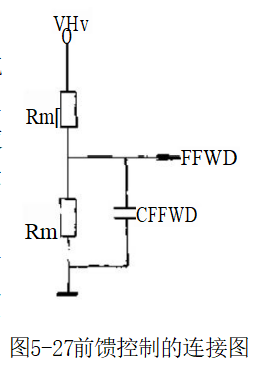
统的带宽可设计得大一些。
该集成电路中,振荡器输出的幅值和整个系统增益都被FFWD电压调制。此电压通常取3.5V。引入前馈控制时,如图5-27所示,从电动机电源电压VHv以电阻分压取得FFWD的电压VFP。同时接滤波电容CFpwD,滤去从VHy来的杂波。电容量的选择是使它和R://Rf₂决定的滤波器时间常数,能滤去主电路的开关频率噪声,但又不会改变120Hz的纹波。后者是指在60Hz电网供电时,VHv可能有的正常纹波分量。
(3)电流控制的模拟电路:IXMS150有两个完全相同的通道,即A相和B相通道。每个通道的模拟电路部分包括信号处理和误差放大器(E/A)。因为从电流检测电阻来的信号总会包含功率级开关电路的瞬变成分,必须对这一信号进行处理、滤波,使系统能工作达到期望的精度。因此,IXMS150使用了专利的模拟和数字信号处理技术,获得真正的相电流平均值。在每个H桥接电流采样电阻,实际电流信号和控制电流指令信号在误差放大器中比较,误差经放大和积分后送至PWM比较器,为H桥产生脉冲调宽控制信号。由COMP1、COMP2、COMP3外接阻容网络进行校正和补偿。
(4)保护电路:该集成电路的保护功能包括过电流关机、最大最小占空比报警、欠电压锁定死区时间插入以及过热、其他外电路故障控制关机。
该集成电路设有两档过电流保护。对应于允许峰值电流,在SENSE上的电压以0.625V为代表。若此处电压超过0.9V,经1ms后,VouT和OUTDIS将被强迫为低电平。它表示电动机电流已超过允许值40%。如果SENSE上的电压增至3.6V,Vour马上变为低电平。此时相当于电流增大了5倍。对第一个限流门槛需要一定时延才动作,这是为了避免采样传感电路噪声或偶然尖峰脉冲引起的误操作。这里,门槛电压值是指电源电压为12V时的情况。
欠电压封锁功能是保证电源接通和关断过程系统正常工作,
避免H桥功率开关因控制电源不正常而引起损耗的增大。它利用一个齐纳二极管检查电源电压VDD是否在8V以上,检查负偏压VB是否达到要求值(典型值应为-1.6V)。杏则,OUTDIS为低电平,表示欠电压封锁状态。直至Vpo和VBB达到正常值才转为高电平,表示系统进入了正常运行状态。
OUTDIS端也可以外接诸如过热保护电路或其他外界故障信号,当故障信号为低电平时,系统输出关断。
(5)PWM电路:由振荡器信号和误差放大器输出信号控制,在PWM比较器产生两个互补PWM信号,然后插入了一定的死区时间,电路中还包括了最小占空比限制电路,这是使用交流耦合H桥电路所必需的,详见应用电路说明。
(6)电源电路:该集成电路典型供电电压VDD=12V。内部产生一个等于Vp/2的基准电压,接至8脚(BYPASS)。常用0.1μF电容连接于8脚和模拟地,以减少噪声干扰。
(7)负偏压产生电路:在某些H桥电路中,电动机电流采样电阻上的电压信号可能是双极性的,要求IXMS150接收。此外,输入指令信号的零漂也是微步距位置误差的主要原因,故希望取输入控制指令电压是双极性的,范围是±2V。由于上述原因,最好本IC采用正负电源供电。为了节省系统成本,使本IC也能在单电源下正常工作,电路设置了一个负偏压发生器。它实际上是一个充电泵电路,交变信号来自振荡器。由外接两个电容器和两个二极管电路产生约等于-VDp/5的负偏压。当VDD=12V时,VBB约为-2.4V。负载能力为3mA。当振荡器频率f=100kHz时,推荐电容值为
C₁=0.047μFC₂=100μF
对于其他频率的情况,取
二极管可用1N914或1N4148。
4.在步进电动机微步距控制中的应用对于两相混合式步进电动机,如果用两相正弦波电流代替一般使用的方波电流供给相绕组;则有
iA=I₀cosθiB=I₀sinθ
各自产生的转矩为
TA=KpiA=K,I₀cosθ
TB=KiB=K₀Iosinθ
由于两相空间位置是正交的,两转矩的合成转矩T=TAcosθ+Tpsinθ=KI。
上式说明,以两相正弦波电流供电时,理想情况下,合成转矩与位置无关,没有转矩波动。上述思想为步进电动机微步距控制的基本原理。问题在于如何以数字方法产生正弦电流。
IXMS150用于微步控制,需要由外部电路产生两相正交正弦电流指令信号(模拟量),从VINA和VINs输入。图5-28给出一种方案。由一个可逆计数器、两个EPROM和DAC组成参考电流波形发生电路。在EPROM中分别写入正弦和余弦函数表。步进指令信号正转脉冲和反转脉冲分别从UP和DOWN端输入,送给计数器进行加减计数,计数器输出作为地址码读EPROM的函数
表,再由DAC转换成正余弦电压信号。也可以采用其他办法,例如由微处理器完成,只需外接两个DAC,由软件产生数字正余弦函数。
在由IXMS150组成的两相步进电动机微步距控制系统中,还需要外接两个H桥驱动电路。每个H桥有两个P沟道的MOS-FET(VF₁和VF₂)和两个N沟道MOSFET(VF和VF₄)。本例,VF、VF₂采用IRF9530,VF₃、VF₄采用IRF532。它们并联有快速二极管VD₁、VD₂(用MUR1610CT)和VD₃、VD.(用MUR410)。栅极驱动采用数字集成电路并联,以提供较大的电流能力,U₁用4049B,U₂用4050B。其特点是利用交流电容耦合(0.047μF),简化了栅极驱动电平转移电路,有较高效率,适用于

电机电源电压VHv从12V到数百伏。其缺点是,对PWM的占空比有限制,不能用到极限值。本电路规定了PWM的最小输出脉宽为0.5μs。在100kHz时,占空比变化允许范围是5%~95%。如果调制频率取得低一些,允许范围可以拓宽。
H功率桥供电电压为VHv、在VF₁和VF₄导通工作时,电机绕组上的电压V≈VH,在VF₂和VF₃导通工作时,Vm≈-VHv。在不同的PWM占空比(DUTY),电机绕组电压的平均值Vm被控制。
Vmav=2VHv(0.5—DUTY)
从而双向控制了绕组的电流。
由6脚和19脚外接500电位器,调节两通道的增益和增益平衡。由4脚外接50kΩ电位器,调节输入级的失调电压。21脚亦可如此设置。
每个H桥的电流检测电阻Rs依下式计算:
Rs=0.625/Impk
式中Impk-—电动机绕组峰值电流。
随便看看
- 2024-09-18线性时不变受控源电路模型 -电路基础知识
- 2024-11-2625YCY14-1B型泵变量活塞的加工工艺过程
- 2024-11-11扭矩曲线
- 2024-11-04电液伺服马达
- 2024-10-14机器人学的意义