
过热保护电路
现分述如下。
(1)输出级:输出级由四个达林顿功率晶体管V,~V.和附加的四个快速恢复肖特基二极管组成,形成典型的H桥电路结构,见图5-14。在开关方式工作时,若输入相极性信号(8脚)为低电平,则V₂、V₃导通。有电流如实线所示路径流经电机绕组。在电流斩波控制“OFF时间”,V₃截止,绕组电流从V₂经绕组和V₁旁边的肖特基二极管续流。此时,由此二极管的作用使15脚电位高于供电电压Vm,经由V₆(此时是导通的)的作用,V₂基极的电位比原先更高一些,从而使V₂在“OFF时间”电流续流时有较低的饱和压降,减少了功耗,改善了输出级电路的效率。
增加V₅和V₆提升电路是UC3717A的重要改进。
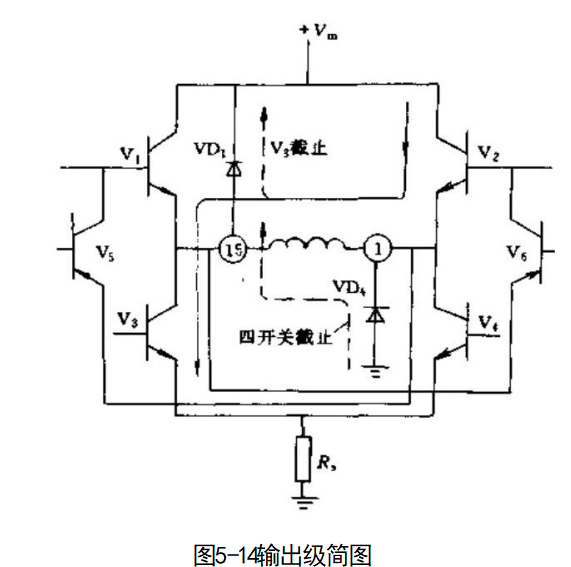
(2)相极性输入信号:8脚的PHASE信号逻辑电平决定了绕组电流的方向。输入通道设有施密特触发电路,有一个固定的时延电路,不但可抑制输入噪声,更重要的是避免H桥在电流反相时出现交叉导通。例如,PHASE最初为低电平,V₂和V₃导通。当PHASE转变为高电平时,V₂和V₃截止,绕组电流经过VD,和VD,续流衰减,直至零。经这段延迟时间后,V₁和V₄才导通工作,使绕组电流反向上升。
(3)电流控制:由基准电压分压电路,三个电平比较器、单稳态电路、2bitD/A选通电路组成绕组电流的控制电路。由单稳态电路固定的“OFF时间”来控制H桥的V₃和V,实现恒流斩波控制。如果以一固定电压VR接11脚,由电阻分压电路作用,三个电流电平比较器的输入基准电平从上到下依次为100%、60%、19%。在16脚外接Rs采样电阻,代表绕组电流的采样电压经RC电路滤波后送至10脚。如表5-13所示,由7、9脚的I₀、I₁逻辑电平的不同组合,选择三个比较器中的一个,从而设定了绕组的峰值电流值。当10脚电平达到被选比较器的基准电平时,单稳电路被触发,V₃和V被关断一个固定的“OFF时间”。绕组电流经H桥上回路续流并衰减。然后开始下一个导通周期。
单稳电路的“OFF时间”ToFF由2脚的Rr和C+决定。
TOFF=0.69R-CT
通常取RT=10~100kQ。
表5-13I₁、1。真值表和对电流的控制
l₁ | Eo | 绕组电流 |
1 | 1 | 无电流 |
1 | 0 | 19% |
0 | 1 | 60% |
0 | 0 | 100% |
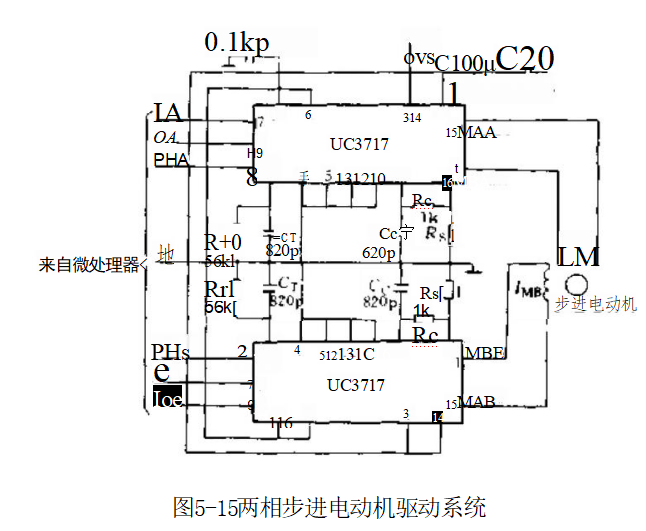
2.在两相步进电动机中的典型应用如图5-15所示,由两片UC3717A可组成一个两相永磁式或混合式步进电动机的微机控制系统。由微型计算机的软件设计或由TTL、CMOS数字电路
硬件可产生正确的I、I₀、PHASE两相控制信号,实现几种运行
方式的控制。
(1)基本步距(整步)方式:以A、B表示两相绕组正向电流工作、A、B表示反向电流工作,可实现两相激励四拍整步工作方式,即
AB→AB→AB→AB
或单相激励的四拍工作方式,即
A→B→A→B
(2)半步工作方式:可实现八拍半步工作方式,即AB→B→AB→A→AB→B→AB→A
这种工作方式是两相激励与单相激励交替出现,每一拍的转矩不相等。在两相激励时,转矩由两相转矩矢量合成,比单相转矩要大(约1.4倍)。如果两相激励时,采用I₁I₀=01方式,使相电流降低到0.6(p.u),由于磁路原先有饱和效应,此时每相转矩可能增大到0.7(p.u)左右,两相合成转矩则接近于1。从这里
可见UC3717A三个电流比较器的作用。
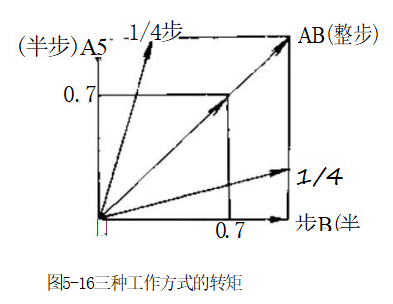
(3)1/4步距的工作方式:为了实现16拍工作,在半步方式下,步与步之间插入1/4步的状态。它是由一相100%电流和另一相选择分数电流达到的。若取I₁I=
10状态。即相电流为
0.19(p.u)左右,可以得到稍均匀一点的步距。图5-16给出了
三种工作方式下的整步、半步、1/4步的转矩矢量合成示意图,它只给出了第I象限情况。
(4)微步距控制:利用11脚(基准电压VR)对电流模拟控制的功能,可以实现对步距的细分控制。用一个单片微型计算机和两片DAC08088bitD/A转换电路即可实现256细分控制。
斩波驱动产生电气噪声会引起电磁干扰问题,在靠近驱动级的电源和地之间并上0.01~0.1μF的瓷片电容是有效的,电流采样电阻的连接线应尽可能短一些。此外,各相绕组并联一个电容C,然后串一个电感L才接至H桥输出端。LC低通滤波器的使用,既降低了电磁噪声,同时也降低了步进电机的损耗,从而降低了温升。滤波器参数可依下式选择:
式中LM-----步进电动机相绕组电感。
和UC3717A类似的产品还有SGS公司的PBL3717A、SILI-CONGENERAL公司的SG3718等。
UC3770A和UC3770B是高性能步进电动机驱动器,它比UC3717、UC3717A可提供更大的工作电流和更低的饱和压降,工作电压为10~50V,双向电流为2A。比较器门槛电平方面,
UC3770B改为100%、71%、50%。此外,这两种电路的H桥两个上桥臂并联的肖特基二极管要由用户外加。
随便看看
- 2024-09-12注意工作机械-挖掘机安全使用维护手册
- 2024-10-28液压减速回路
- 2024-10-02液压挖掘机的工作原理
- 2024-10-14连续系统和离散系统的模型化
- 2024-09-13时间调整-挖掘机驾驶装置篇