
HEF4752专用大规模集成电路
HEF4752是1980年Mulard公司推出的专门产生三相SPWM信号的大规模集成电路。无须微机配合,属纯硬件实现,利用COCMOS技术制造。它的驱动输出经隔离放大后,既可驱动晶闸管逆变器,也可驱动晶体管逆变器,在交流电机变频调速和不间断电源中用作中心控制器件。输出频率在1Hz到上百赫兹之间连续可调。目前,在国内市场上可以容易地买到国产的或者是进口的该类器件。
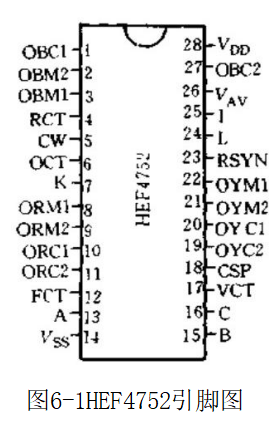
1.主要引脚介绍它的引脚见图6-1,用标准的双列直插28脚封装。它有7个控制输入、4个时钟输入、12个逆变器驱动输出和3个控制输出。
引脚功能说明如下。
(1)逆变器驱动输出信号(O表示输出;R、Y、B表示红、黄、蓝相;M表示主开关器件;C表示换相开关器件;1表示上侧开关器件;2表示下侧开关器件)。
引脚8(ORM1):驱动R相上侧主开关器件
引脚10(ORC1):驱动R相上侧换相开关器件
引脚22(OYM1):驱动Y相上侧主开关器件
引脚20(OYC1):驱动Y相上侧换相开关器件
引脚3(OBM1):驱动B相上侧主开关器件
引脚1(OBC1) | :驱 | 动B相上侧换相开关器件 |
引脚9(ORM2) | :驱 | 动R相下侧主开关器件 |
引脚11(ORC2) | :驱 | 动R相下侧换相开关器件 |
引脚21(OYM2) | :驱 | 动Y相下侧主开关器件 |
引脚19(OYC2) | :驱 | 动Y相下侧换相开关器件 |
引脚2(OBM2) | :驱 | 动B相下侧主开关器件 |
引脚27(OBC2) | :驱 | 动B相下侧换相开关器件 |
(2)控制输入
引脚24(L):封锁输出
引脚25(I):选择晶闸管或晶体管模式
引脚7(K):选择互锁推迟间隔
引脚5(CW):相序控制引脚13(A):复位控制引脚15(B):测试用引脚16(C):测试用
(3)控制输出
引脚23(RSYN):R相同步信号引脚26(VAv):平均电压
引脚18(CSP):电流采样脉冲
(4)时钟输入
引脚2(FCT):频率时钟
引脚17(VCT):电压时钟
引脚4(RCT):最高开关频率基准时钟
引脚6(OCT):互锁推迟时钟
2.主要引脚的使用说明HEF4752既可驱动晶闸管逆变器,也可驱动晶体管逆变器,由输入控制信号I的电平加以控制,见表6-1。
表6-1I的操作
I | 0 | 1 |
摸式 | 晶体管 | 晶闻管 |
用于晶闸管逆变器时输出12个驱动信号,其中6个驱动主晶
闸管·6个驱动换相辅助晶闸管。晶闸管模式F,输出的是经过高频调制的脉冲列。
输入控制信号K和时钟输入OCT的频率共同决定互锁推迟间隔的长短和晶闸管模式下触发脉冲串的频率和宽度,见表6-2。
表6-3示出了CW的操作,它的电平决定三相输出的相序。
表6-2K和OCT的操作
K | 互锁推迟间隔 (ms) | 触发脉冲频率 (kHz) | 触发脉冲宽度 (ms) |
0 | 8/foCT | focr/8 | 2/focT |
1 | 16/focT | focT/16 | 4/focT |
表6-3cW的操作
CW | 0 | 1 |
相序 | R、B、Y | R、Y、B |
输入控制信号L用来控制起动/停止。L为低电平时,在晶体管模式下封锁所有脉宽调制驱动输出,但产生输出信号的内部电路仍在“运行”;在晶闸管模式下仅封锁M1的输出不封锁M2的输出。L置高电平,解除封锁。其功能除起/停电路外,还可方便地用于过电流保护等。
控制输入A、B、C供制造过程中试验用、通常不用,但必须接到Vss(低电平)。A还有另外一个用处,刚通电时,A置高电平初始化整个IC片,被用作复位信号。
表6-4总结了HEF4752控制输入与其工作情况的关系。
表6-4控制输人与工作情况的关系
控制输入 |
工作情况 | ||||||
L | K | 1 | CW | A | B | C | |
× | X | X | X | 1 | 0 | 0 | 初始化IC(复位) |
1 | 1 | 0 | 0 | 0 | 0 | 0 | 晶体管方式相序R、B、Y |
1 | 1 | 0 | 1 | 0 | 0 | 0 | 晶体管方式相序R、Y、B |
2 | 1 | 1 | 0 | 0 | 0 | 晶闲管方式相序R、B、Y | |
1 | 1 | 1 | 1 | 0 | 0 | 0 | 晶闹管方式相序R、Y、B |
三相PWM输出的频率fou由时钟输入FCT的频率fFcT决定,它们之间的关系如下:
fpCT=3360fout
HEF4752自动地使输出电压与输出频率成线性关系,直到100%调制发生,也就是邻近的脉冲开始合并。100%调制发生时,输出电压的基波有效值等于0.624Vd,与直流中间部分的电压Va有关。100%调制时的输出频率four(M)可由下式算出:
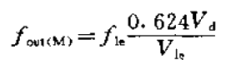
式中fe——电动机的额定频率;
U—电动机的额定电压有效值。
有了fout(M),时钟输入VCT的频率fvcr由下式确定:fvcT(NOM)=6720fout(M)
比值fpcr/fvCT(NOM)很重要,低于0.5时调制是正弦的;高于0.5时波形逐渐向矩形波转变(由于脉冲合并的结果);在2.5左右达到全矩形波输出;高于3时,由于内部同步电路失去作用,波形变得很不稳定,可见3为频率比的上限。
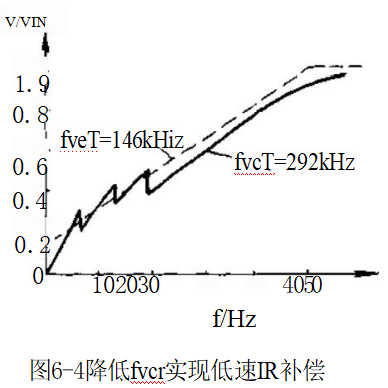
fvcr控制调制深度,减小fvcT导致输出电压增加,实际上是比值V/f增加。为了低速时的IR补偿,fvcr的值需要在低频时减小,而不是在整个调频范围内保持恒定。例如,取fvcT=0.5fvcT(NOM),就可以提高低速时的电压,改善低速时的带负载能力。
输入时钟RCT是固定时钟,用来设定最大逆变器开关频率fs(MAX),它们之间的关系由下式确定:
fRCT=280fsMAX)
逆变器开关频率的最小值由HEF4752内置为0.6fs(MAX)。这个开关频率范围的适用条件是fFcr保持在0.043fRcT到0.8fkcT的范围内和frcT/fvcr小于0.5。
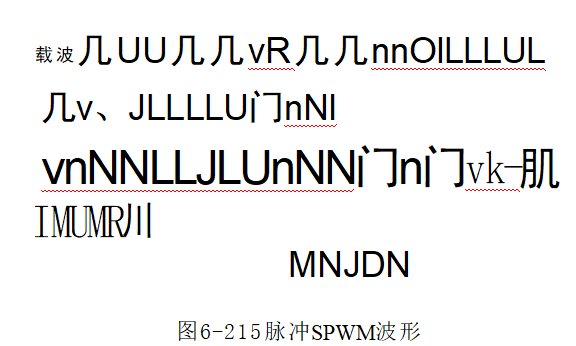
HEF4752使用双沿调制,载波比在8个值(15、21、30、42、60、84、120和168)中选取。每个周期15个载波脉冲适用于较高的输出频率范围,其波形见图6-2。当输出频率降低时,每个周
期的脉冲数有级增加,当输出频率降至最低范围时,载波比等于168。当运行于载波比变化点附近时,为了避免不稳定,设置有载波比重叠区。
为了安全工作,通电时HEF4752需要一个初始化过程。在此过程中,HEF4752的PWM输出被封锁,正确的时钟和输入条件建立起来。在初始化的前半段,内部清零。有两个办法可以实现这一点;
(1)加高电平到输入A;
(2)至少送3360个脉冲到FCT。
关于HEF4752的更详细的情况,可参考文献[31]。
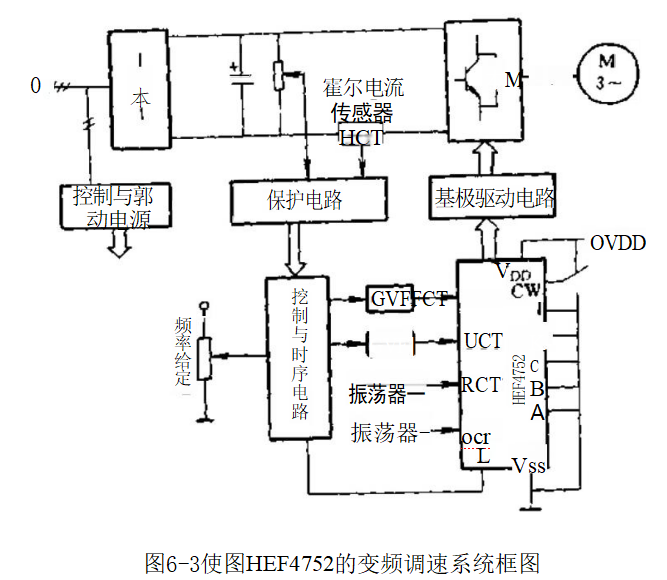
3.HEF4752在交流电机变频调速中的应用图6-3所示为异步电动机交-直-交变频调速系统框图,其中使用了HEF4752产生三相PWM驱动信号。三相380V交流电经二极管桥式整流和电容器滤波后(电压型),得到的直流电压Va约为530V,经霍尔电流传感器送到晶体管逆变器,逆变器输出接3相异步电动机。该电动机在50Hz时的线电压为380V。HEF4752的驱动输出信号
经隔离,放大后送至相应的晶体管的基极。HEF4752的控制输入A、B、C、K和I接Vss(低电平);CW根据对相序的要求,或者接高电平或者接低电平,可转换;L通过控制和时序电路完成初始化和故障封锁功能。
根据上述的计算式,可得

fvcT(NOM)=6720fou(M)=292kHz
若将fvcT固定在292kHz不变,则fout在43.5Hz以下,调制是正弦的,逆变器输出电压和频率保持线性关系;高于43.5Hz,调制脉冲开始合并,输出电压波形逐渐向矩形波转变,在43.5×2×2.5Hz=218Hz时达到全矩形波输出;推荐的最高输出频率为43.5×2×3Hz=261Hz,超出此限,频率将变得不稳定。
为了改善低速时的带负载能力,引入了低速IR补偿。当输出频率高于某一设定值时,比如20Hz时,使fvcr=292kHz恒定不变;低于该设定值时,使fvcT逐级减小,补偿程度逐级增加,在
5Hz时减为fvcr=146kHz,见图6-4。
fFCT由压控振荡器(GVF)产生,它的频率上限为3360×261Hz=880kHz,
对应着four=261Hz。fPCT的上限也可以由其他因素限定为小于880kHz的某一个值。
选取逆变器开关频率的最大值为1kHz,则时钟输入RCT的频率为
fRCT=280×1kHz=280kHz
当输出频率变化时,HEF4752将利用逐级改变载波比的办法自动地使开关频率限制在600~1000Hz之间变化,条件是fo在3.58~66.67Hz之间变化。超过66.67Hz,将维持最小载波比不变,因此开关频率将超过1kHz。但是,由于相邻脉冲的合并,实际的开关频率要小于计算值;低于3.58Hz,载波比将维持在168不变,因此开关频率将低于600Hz。
根据主电路的要求,选取互锁推迟间隔为24μs,考虑到表6-2中K=0,从而0.024=8/focT得到focT=333kHzfRCr和focr可由自激多谐振荡器产生。为了简化线路,可以使focT=fRCT=300kHz,从而省掉了一个多谐振荡器。
当发生过电流、过载、过电压、欠电压等故障时,控制电路通过置L为低电平,封锁HEF4752的输出,使逆变器停止工作。
初始通电时,控制与时序电路提供一个初始化过程。这里是用12kHz(0.04fRcT)的频率送3360个以上的脉冲到FCT时钟输入端实现的。
随便看看
- 2025-01-29CGS和边界表现
- 2024-09-23间隙密封-液压传动基础知识
- 2024-09-25压电式传感器测量原理
- 2024-12-06节流阀的故障排除与修理
- 2025-01-16常用电子元器件的识别与简易测试