
AN8290NSCD机主轴驱动器
松下电子公司的AN8290NS三相无刷直流电动机PWM驱动电路,适用于CD机主轴驱动及其他类似用途。
1.特点
·宽工作电压范围Vcc=4.5~20V
·三相全波换相PWM驱动
·只需用两个霍尔元件可确定正确转子位
·电流负反馈,限流控制·内设过热保护
2.引脚功能说明(见表3-11)
表3-11AN82904S引脚功能说明
引脚号 | 符号 | 功能说明 |
1 | GND | 地 |
2 | DCR | 内部基准电压输入端,并用来与PC、CLK信号比较 |
3 | FAl | 滤波放大器的转矩指令输入端 |
4 | FAO | 滤波放大器输出端 |
5 | DI | 绝对值电路输人端 |
6 | LPF | 接电流反馈环相位补偿电容 |
7、8,9 | A,A₂,As | 三相驱动输出,接三相绕组 |
11 | CS | 接电流采样电阻 |
12 | PVcc | 功率级电源端 |
10 | PGND | 功率级地端 |
13,14 | HF,Ht | |
15、16 | H2,H | 霍尔元件输人端 |
17,18 | Hi,Ht | |
19 | HSW | 三尔元件的电压偏置端 |
20 | HB | 霍尔元件电源(典型值2V) |
21 | Vcc | 正电源 |
22 | PC | 功率控制输人端 |
23 | CLK | 外接时钟输入端,控制PWM频率 |
24 | TC | 接锯齿波发生器外接电容 |
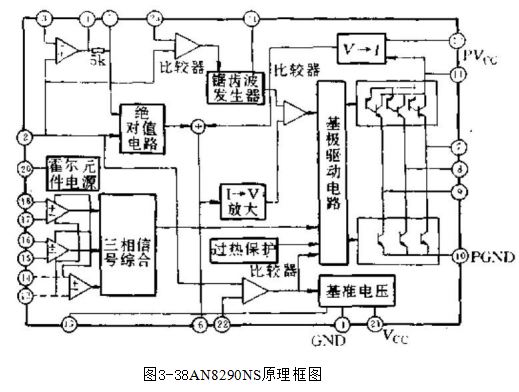
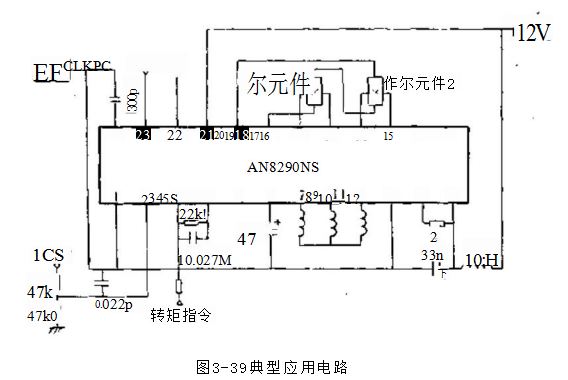
3.工作原理及应用电路该芯片为24脚扁平封装,常用±6V或+12V供电。该应用示例由+12V供电。其原理框图见图3-38。应用电路图见图3-39。
(1)霍尔转子位置传感器:对于三相全波换相方式,通常需要用三个霍尔元件。该芯片允许仅用两个霍尔元件,但它们的输
出必须近似为正弦波。图3-39中13、14脚空置,用H1、H2两个霍尔元件,其霍尔电压是VH、VH,可以由内部产生相当于第三个霍尔元件的电压VH₃。其原理是基于下面的运算
设VH=VHsina
VH₂=VHsin(α+120°)
取VH₃=-(VH+VH₂)
=-VH[sinα+sin(a+120°)]=-VHsin(α十60°)一VHsin(a-120°)
因此,要求电机磁场为近似正弦波,并使用线性输出的霍尔元件。本芯片不适用于气隙磁场为梯形波分布的电动机。
(2)锯齿波发生器:在24脚接电容C=1500pF,23脚输入控制时钟CLK。在CLK下跳沿,24脚以0.2mA吸入电流使C放电。当24脚电压放电至门槛电压,内部比较器翻转,电容C以0.1mA源电流充电,形成锯齿波上升斜坡。在本电路中,锯齿波幅度约为1V。此信号送PWM比较器输入端。
(3)电流限制与电流反馈环;在11、12脚之间串接电阻R,供电流采样用。当其上压降达到约0.6V时,限流电路动作。这里取R.=2Ω,其限流值I.≈0.6/R,=300mA。
Rs还为电流反馈环提供电流反馈信号。6脚外接电容是反馈环的相位补偿电容。电流环指令是外部转矩指令(从3脚输入)经滤波放大器得到。3脚和4脚间的外接RC网络,在转矩指令是脉宽调制信号时,起滤波器作用;若输入是模拟量信号,则起相位补偿作用。
滤波放大器输出经绝对值电路后与反馈电流比较,其误差再与锯齿波比较形成PWM信号,控制IC的输出,调节电动机的电流和转矩。
(4)功率控制:22脚功率控制端在施加低电平时,芯片工作于正常状态;输入高电平时,内部基准关闭,且19脚截止,霍尔元件无电流输入,IC输出关闭。22脚实际上是起/停控制端。
随便看看
- 2024-12-09静压支承的故障分析及排除
- 2024-10-31液压系统中噪声产生原因及解决措施
- 2024-11-20配流盘的缸体结构
- 2024-09-19节流阀的故障和排除-液压传动基础知识
- 2025-01-212MC33030微型直流伺服电动机控制器/驱动器